こんにちは、あっきぃです。
先日発売されたRaapberry Pi AI Cameraのサンプルをミドクラ様からお借りできましたので、さわってみたレポートをお送りします。
製品のようす
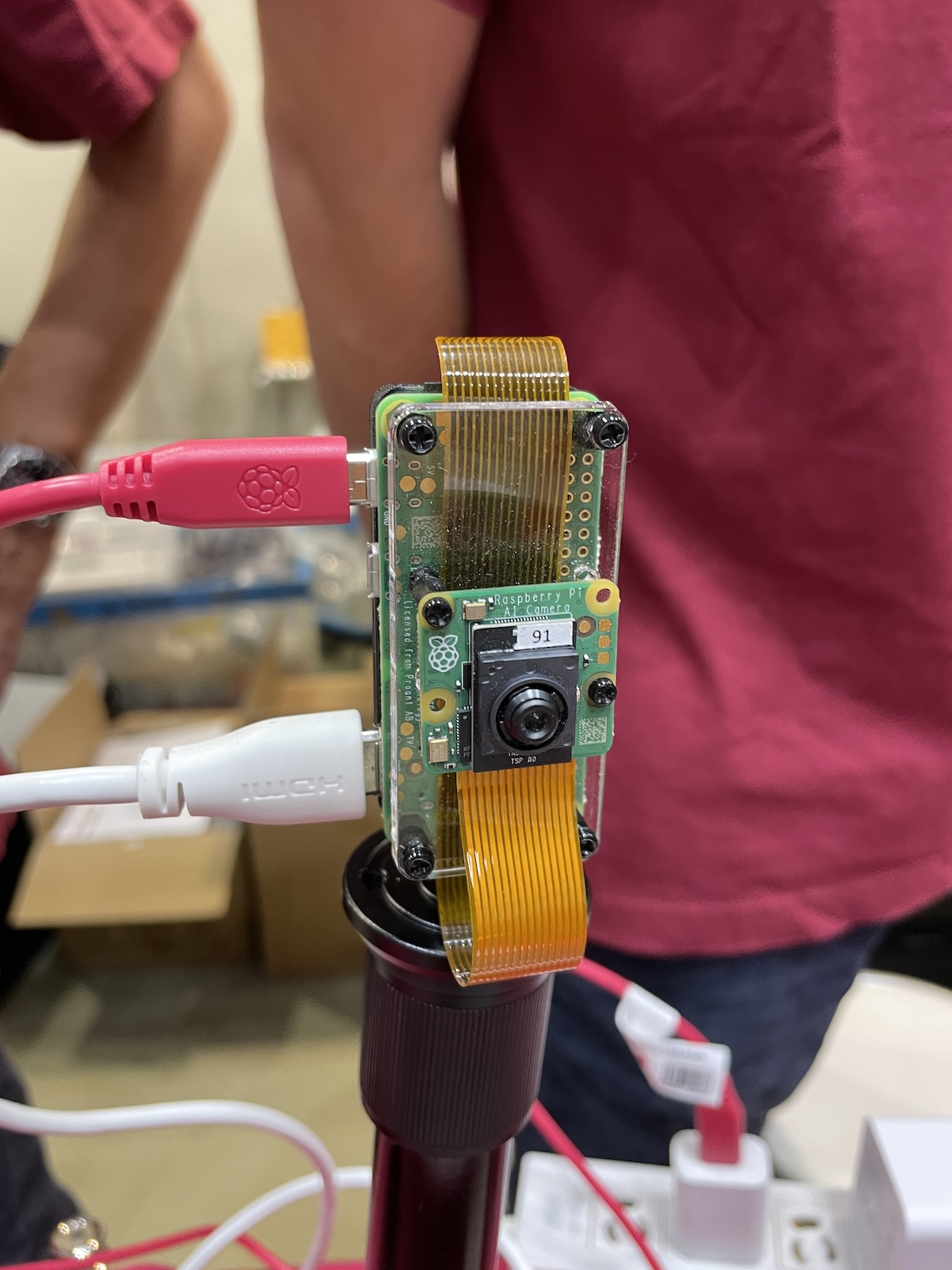
カメラ本体。カメラセンサーはソニーのIMX500という、2020年頃に登場したセンサーを使用しています。
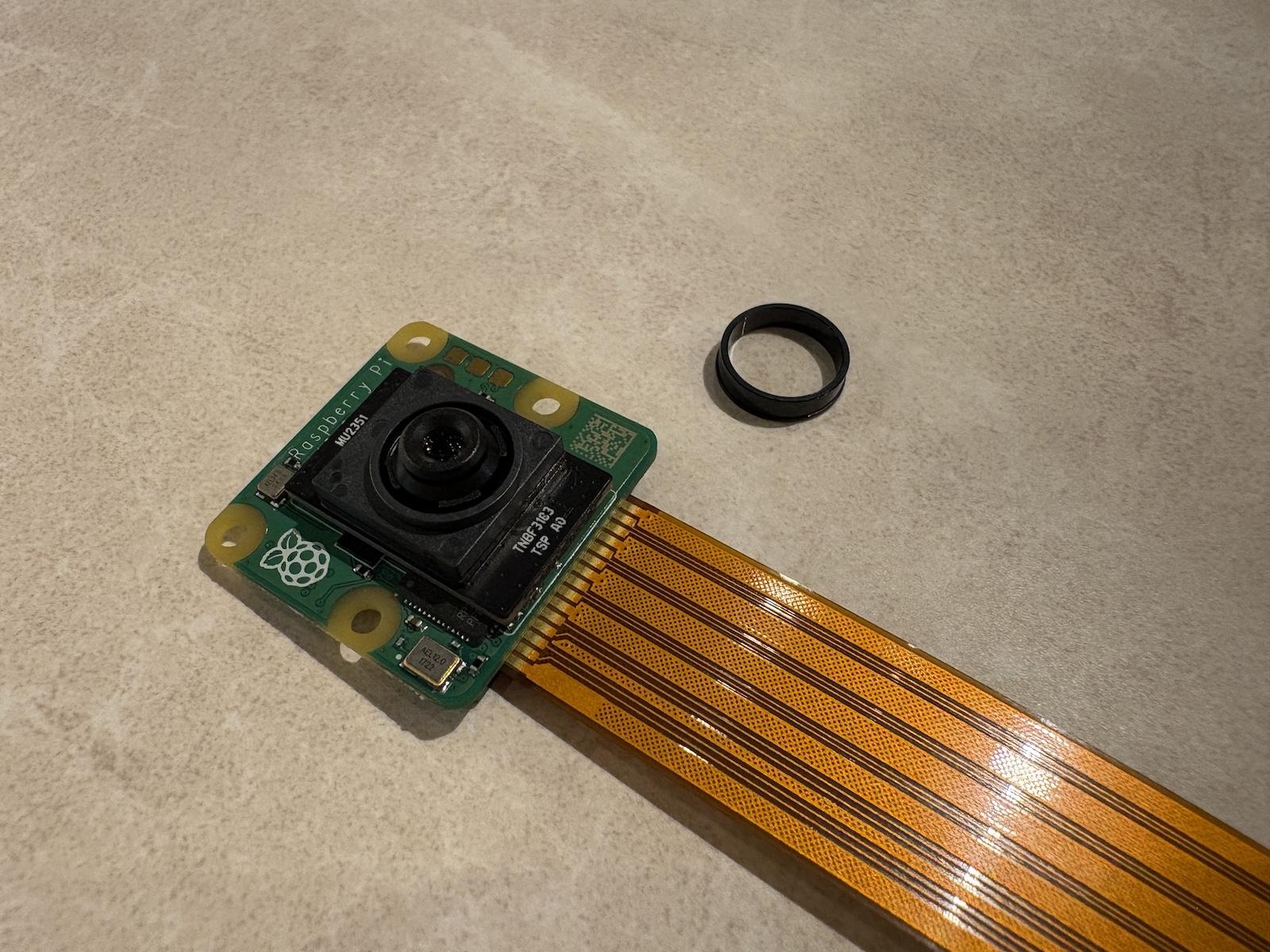
一見すると今までのカメラモジュールと同じように見えますが、AI Cameraは、搭載されているIMX500カメラセンサー自体がAI処理を実行して結果を返すため、映像と結果を受け取ることも、結果だけ受け取ることもできます。後者を活用すれば、通信帯域を節約しながら物体検出を行ったり、プライバシーに配慮しながらデータを軽量に保存することも可能になります1。ちなみに、右側のパーツはレンズ部分に付属する保護カバー?のようです。使うときは外して使用するようです。
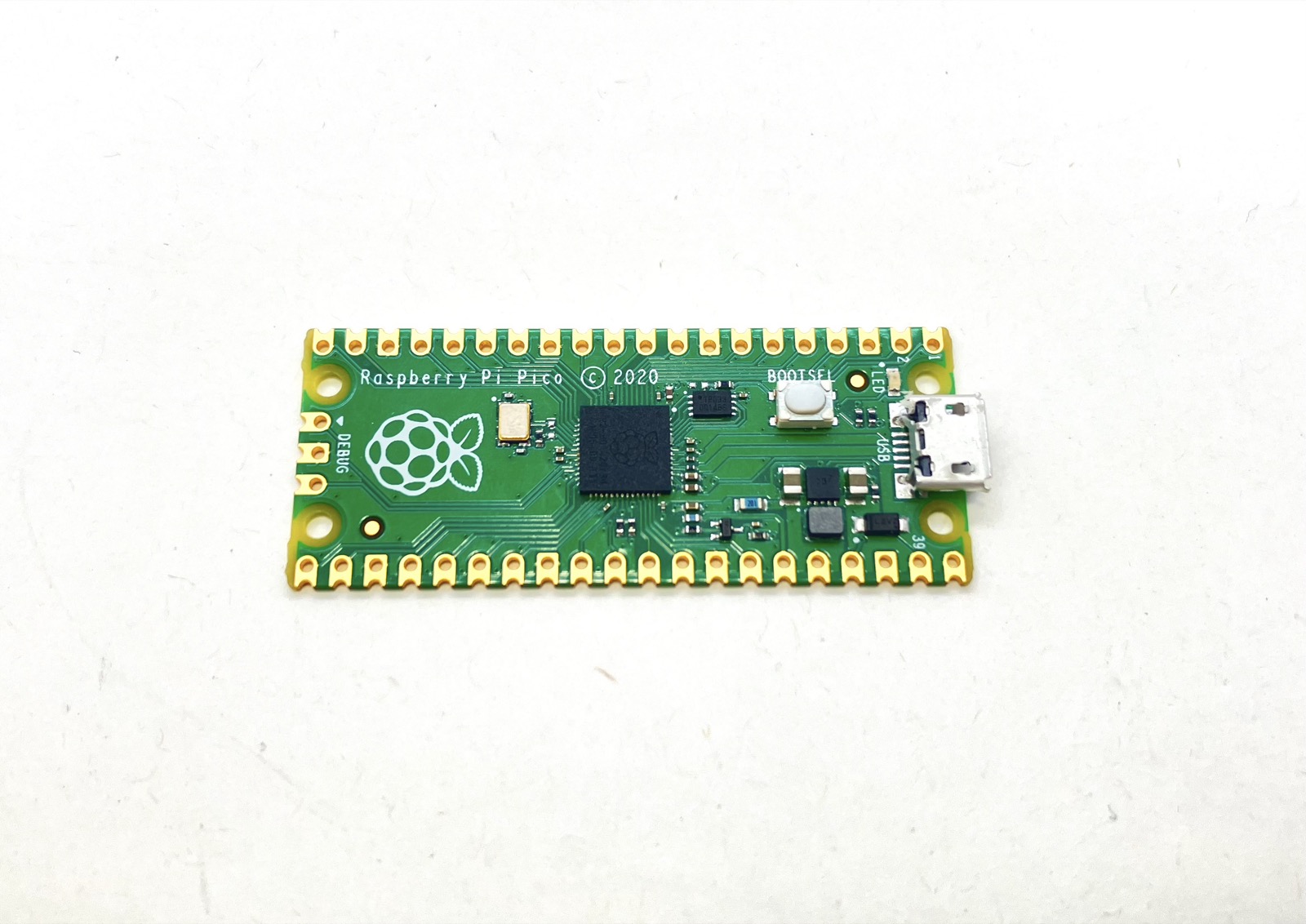
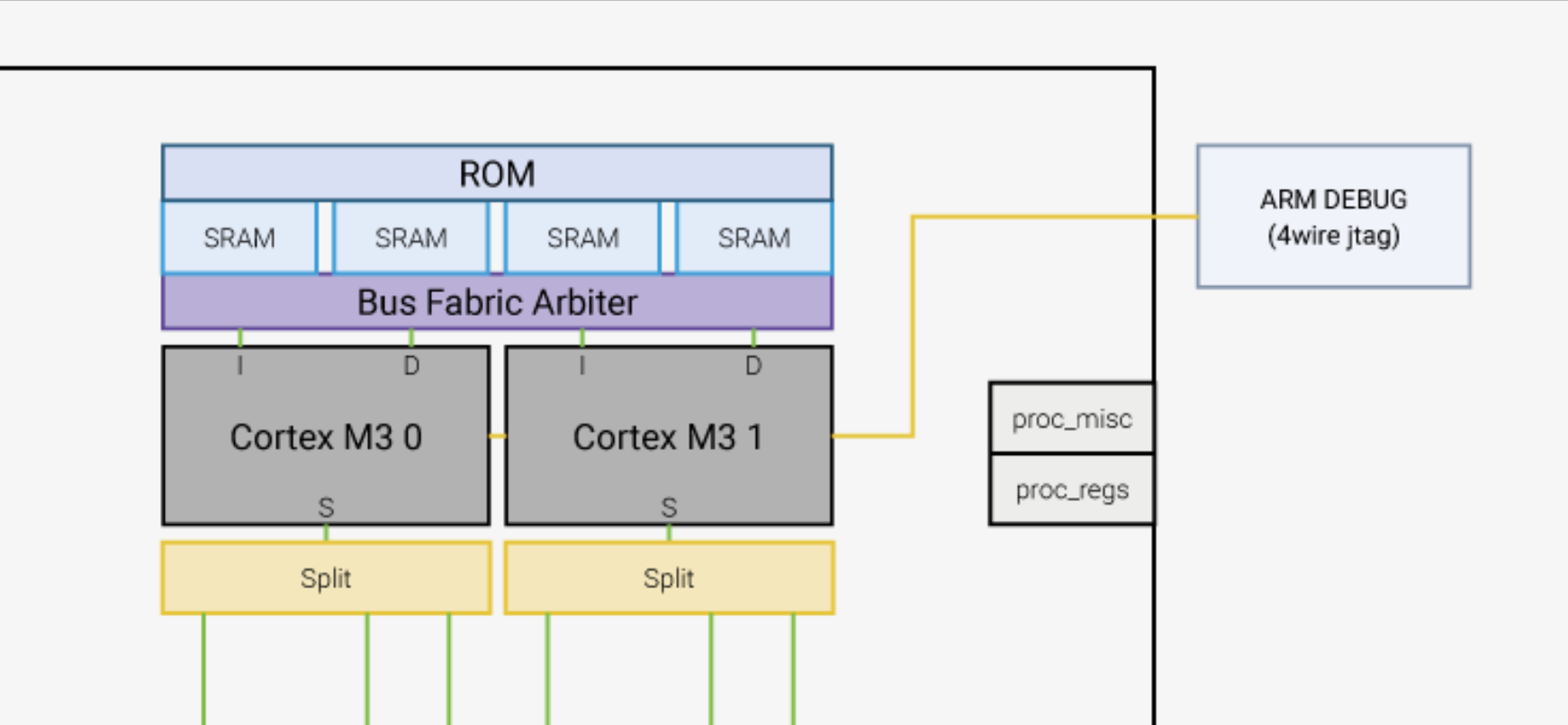
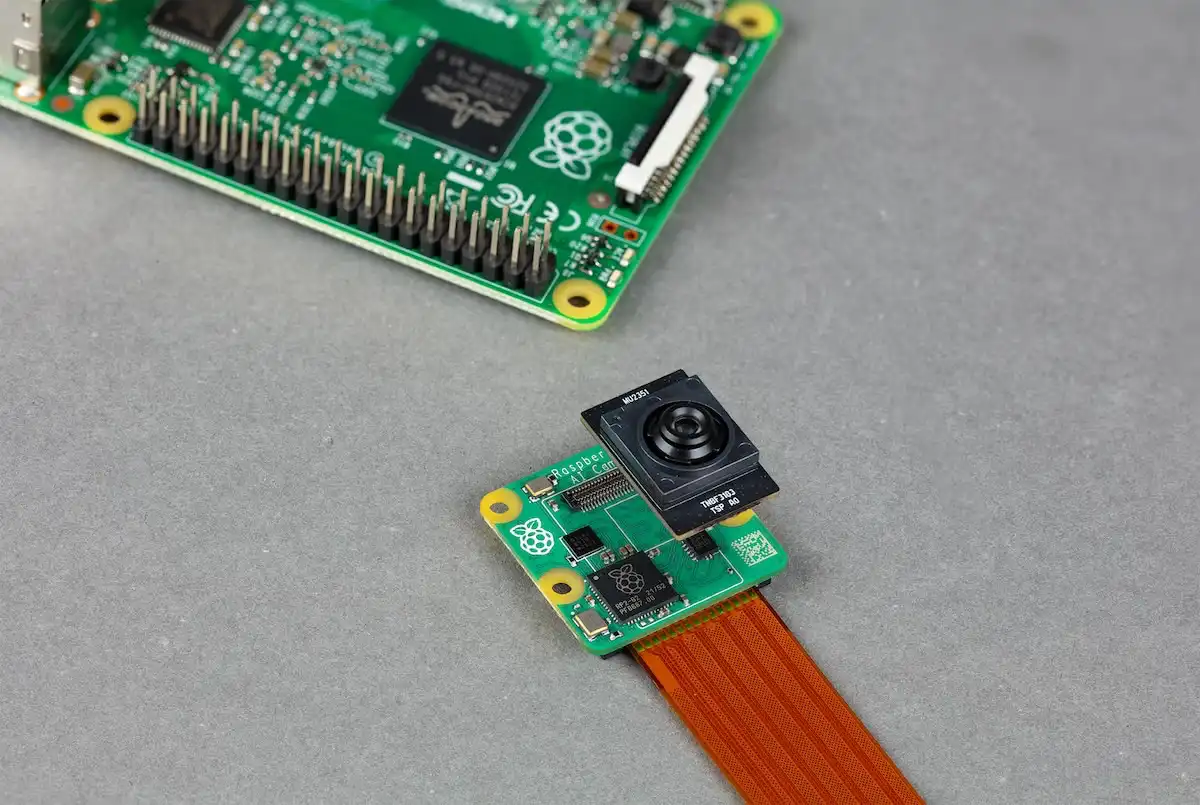
カメラセンサーの下にチップが見えていますが、これはRaspberry Pi PicoでおなじみRP2040チップです。以下は製品画像の引用2ですが、センサーの下はこうなっているようです。
こちらは特筆することはないのですが、カメラセンサーの裏側も。

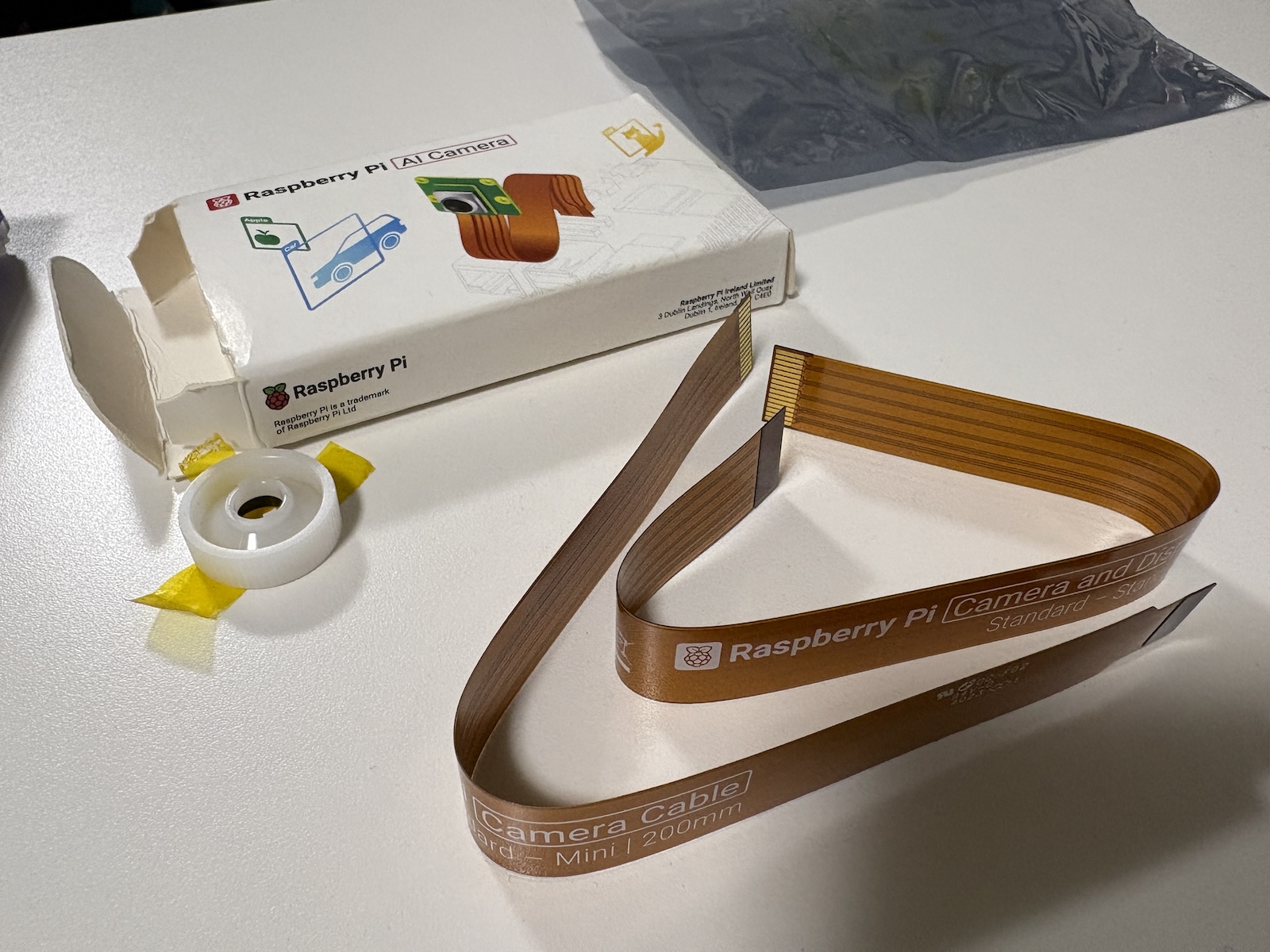
パッケージと付属物はこちら。白いドーナツ状のパーツは、Camera Module2にも付属していた。レンズのフォーカス調整用リングです。カメラケーブルはPi 5で登場した、今までより硬めのケーブルが、Pi 5とZero系向けのものと、それ以外の従来モデル向けのものの2種類付属しています。
導入してみよう
今回はドキュメントのチュートリアルをそのまま試すだけとしたため、手順は以下のページを参照ください。
https://www.raspberrypi.com/documentation/accessories/ai-camera.html
とはいえ、OSを最新にアップデートして(カーネル、libcamera、Picamera2などをIMX500のバージョンに上げる必要があります)、imx500-allパッケージを導入するだけで遊び始められるため、比較的かんたんです。
動かしてみる
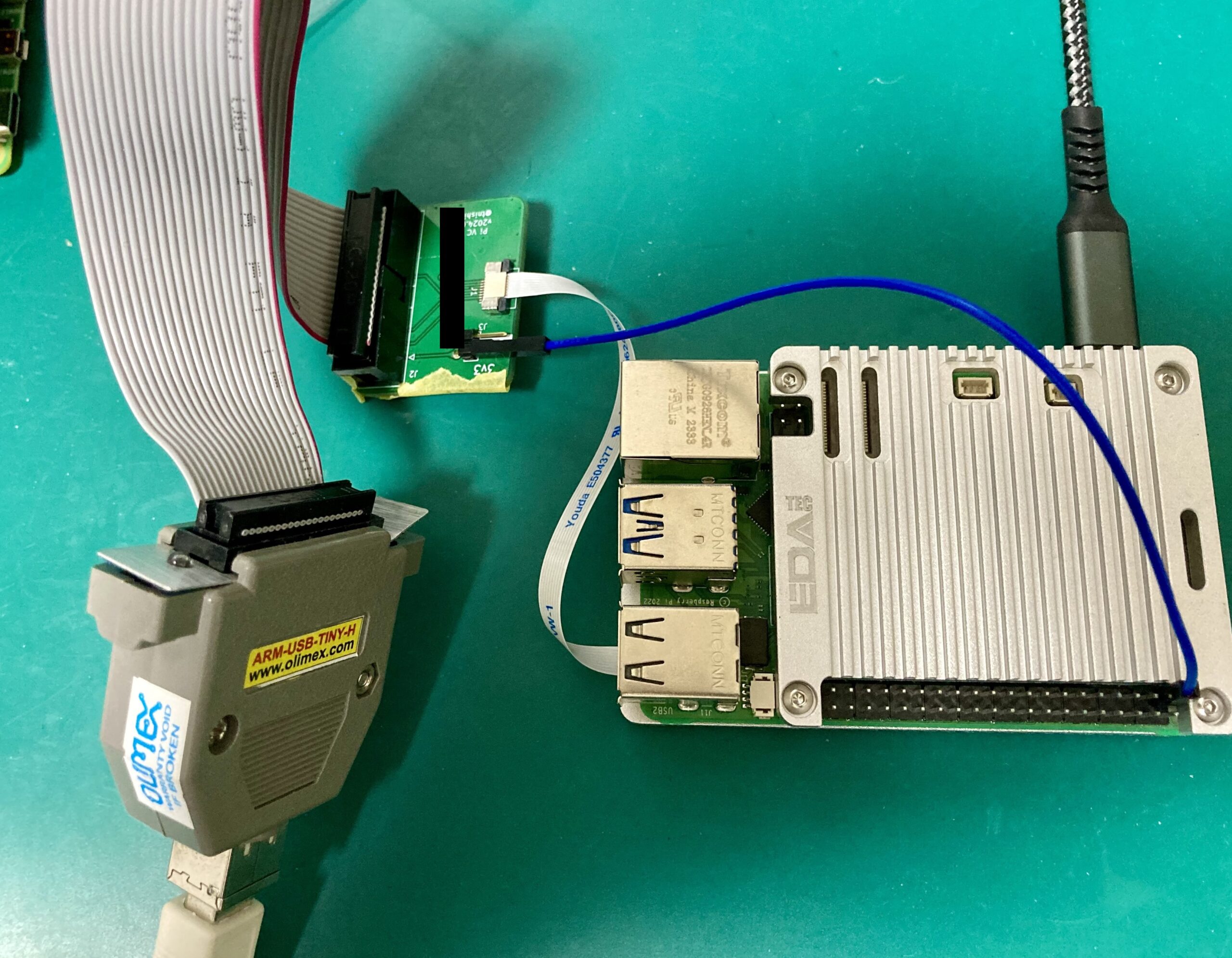
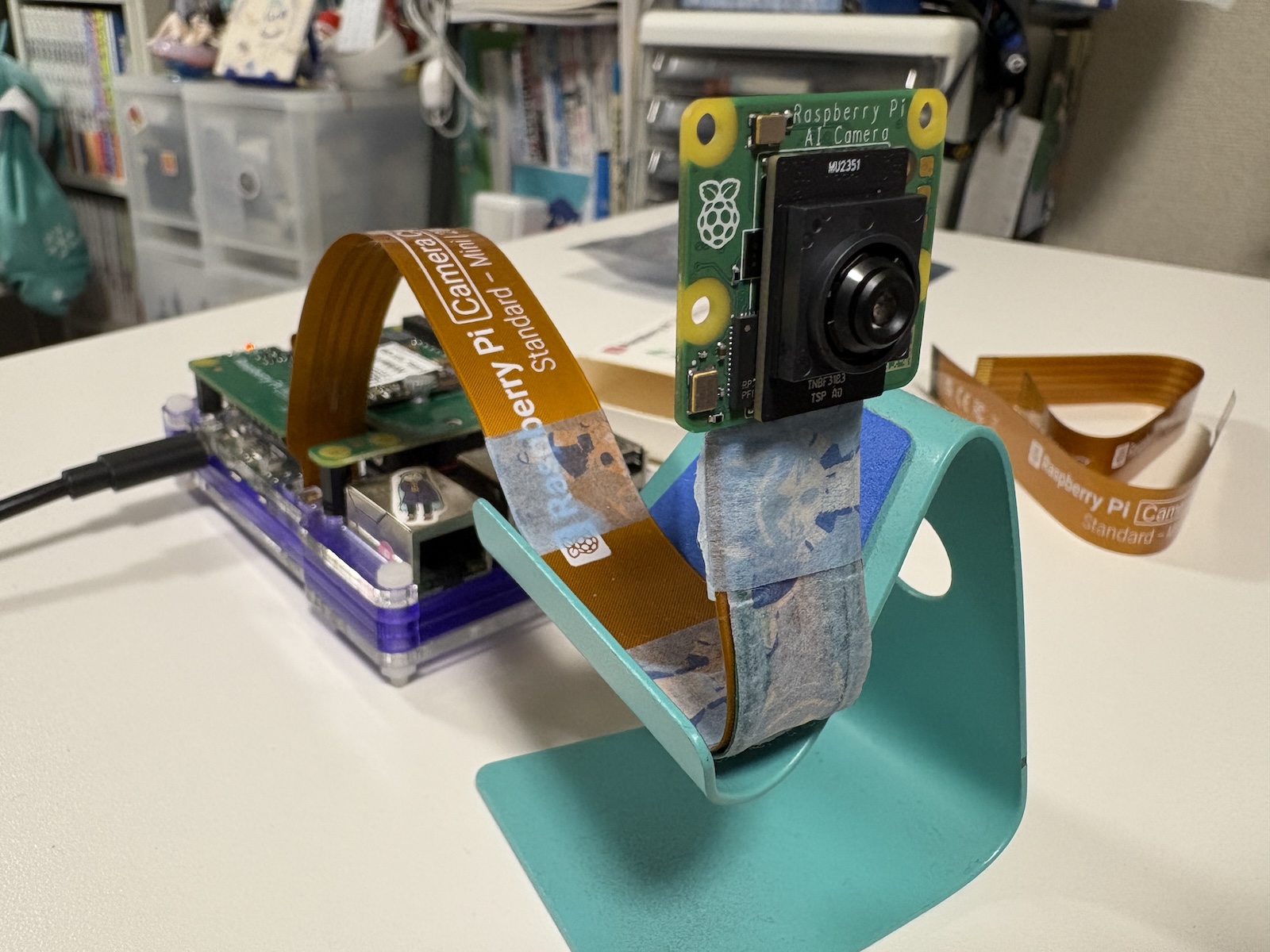
実際に動かしてみましょう。まずはRaspberry Pi 5を使用して、いろいろなサンプルを動かしてみました。カメラは、カメラケーブルにマスキングテープで針金(ケーブルを束ねるのに使われているネジネジのやつ)を貼り付けて、フレキシブルなケーブルにするハックと、スマホスタンドの組み合わせで固定しました。
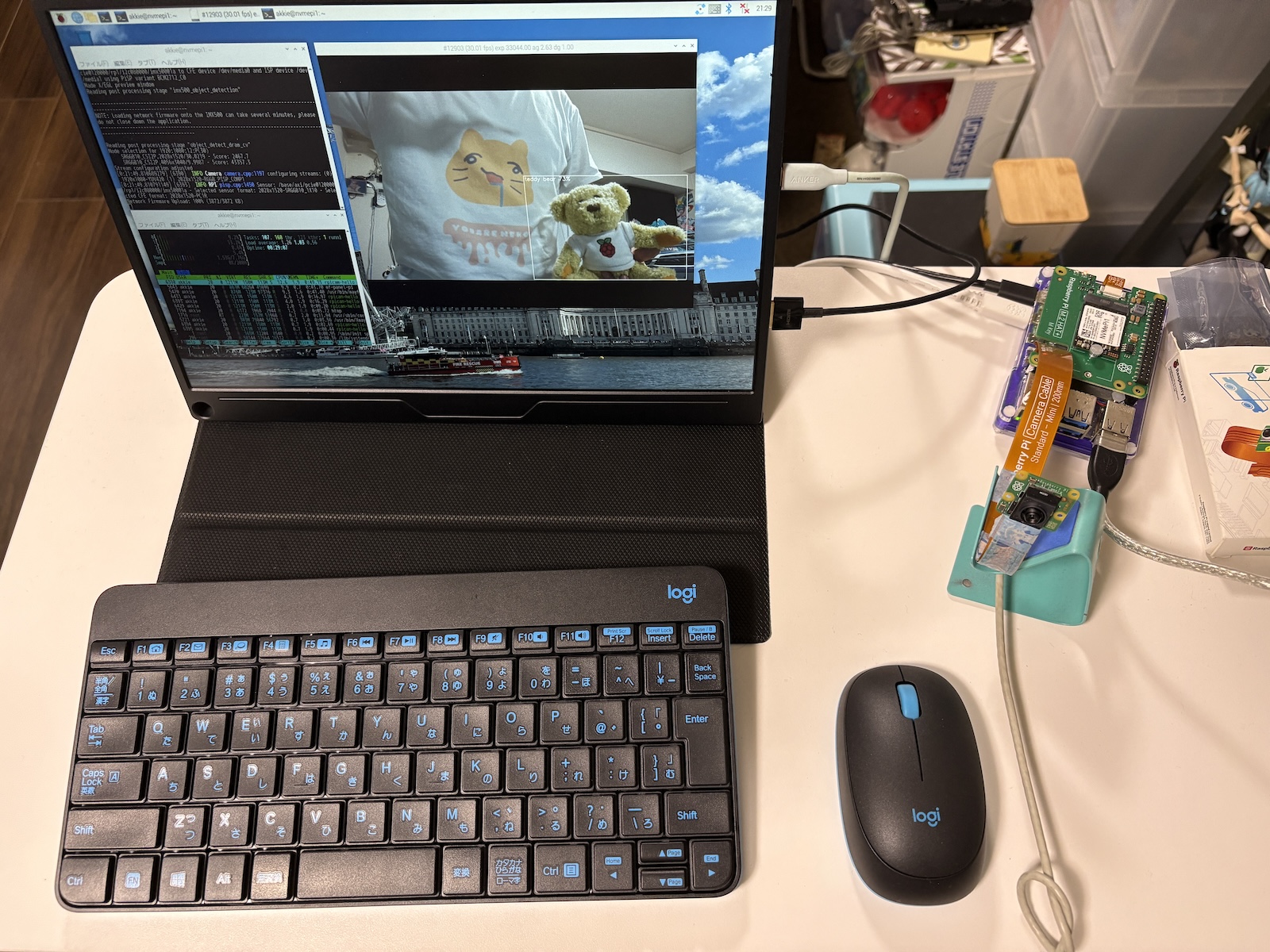
まずはシンプルな物体検出のサンプル。最近はあまり見かけないような気もする、Raspberry Pi公式マスコットのクマ「Babbage Bear」が、きちんと「teddy bear」として認識されていますね。皆さんご存知でしょうか?Pimoroniで現在もふつうに購入できるので、気になる方はこちらです。
少し見づらいですが、ディスプレイの左下でhtopコマンドを実行しています。Raspberry Pi自体に負荷がそれほどかかっていない=カメラがAI処理をやっています。
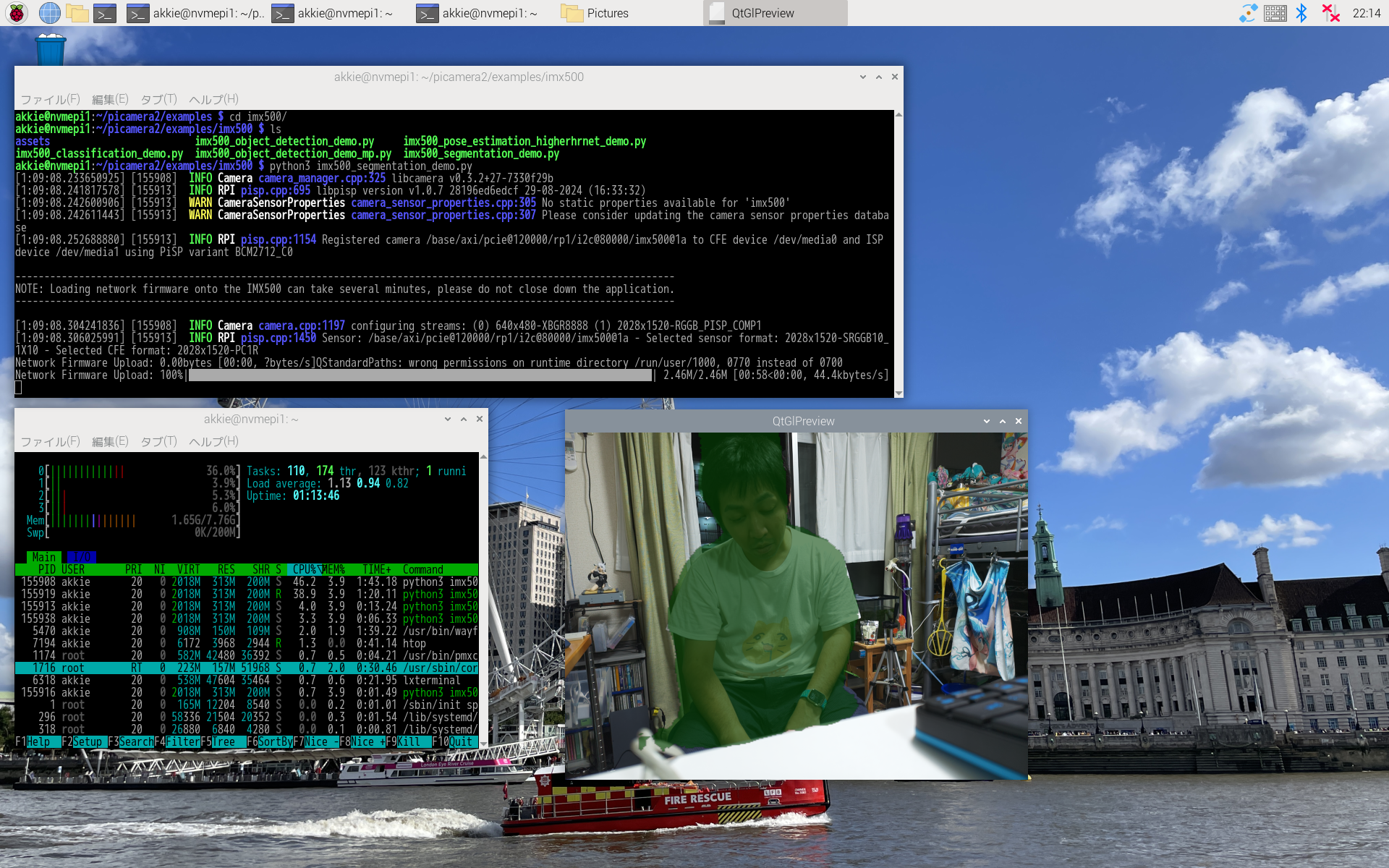
こちらはスクリーンショットでちゃんと撮影してかつ、Picamera2バージョンの物体検出サンプルです。AI Cameraももちろん、Picamera2で開発できるのが利点の一つです。こちらのほうがhtopの結果が見やすいですね。ちなみに、左上のデモ実行の出力を見ると、Network Firmware Uploadという出力が見えますが、コマンドを実行すると、カメラにデータを転送する処理があり、起動までに30秒〜1分ほど時間がかかります。

こちらは人間のモーション検出デモ。これも先のデモも含め、AI Kitで同様のデモが実行できますが、ほぼ同じことがカメラだけでできています。おかしなポーズをとってもちゃんと認識していますね。
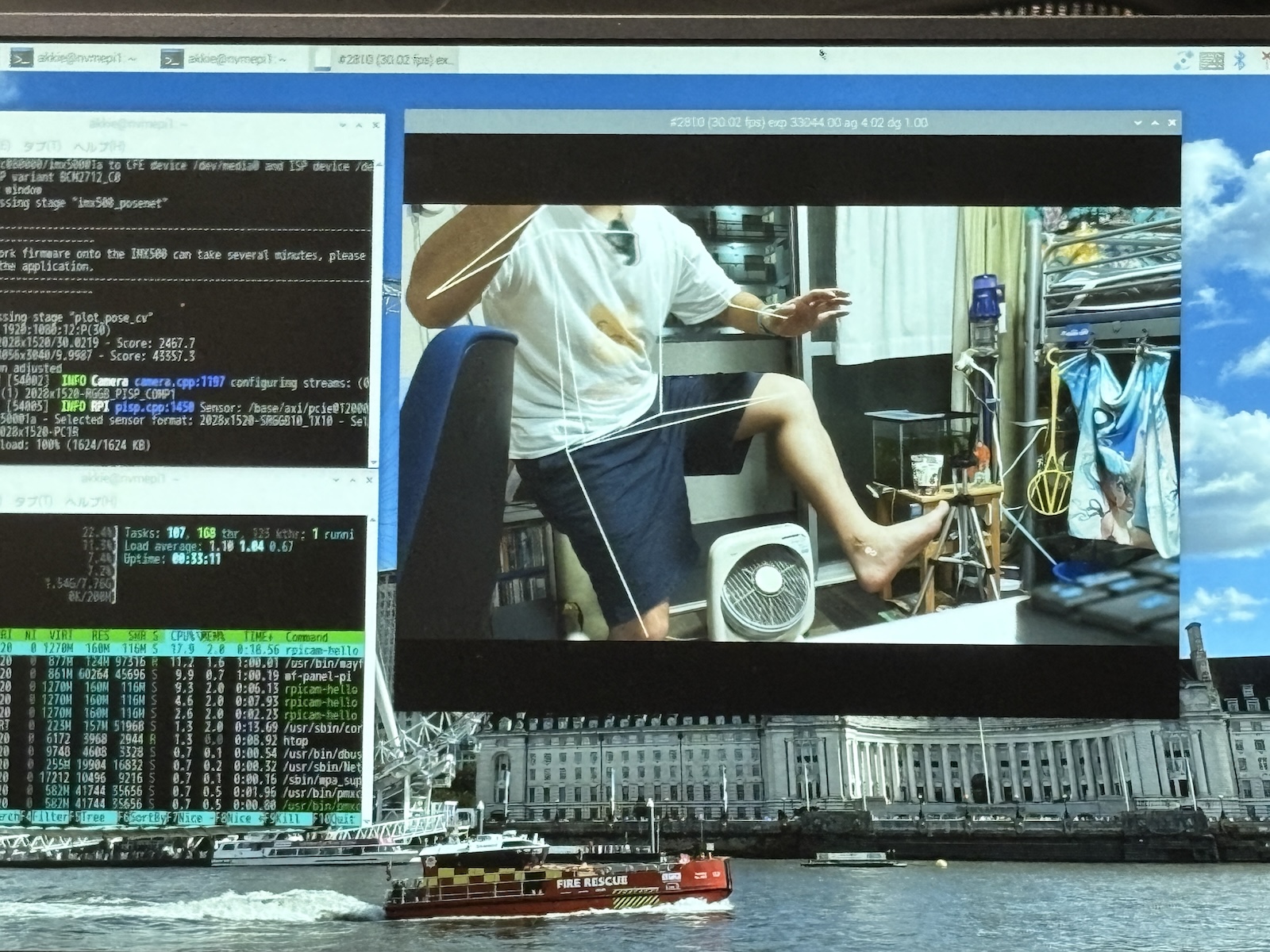
これはセグメンテーションのデモ。検出したものの物体に色をつけてくれるものですが、暗めの緑で色付けをされて、呪いにかかった人間のエフェクトっぽいなと思ったので、そんなポーズにしてみました。夜に試していたときの写真なので、実際に疲れているのですが。
他のモデルでも動かしてみる
AI Cameraのリリースの記事では、AI CameraはPi Zeroをふくむすべてのモデルで動作しますと言及されています。
The AI Camera can be connected to all Raspberry Pi models, including Raspberry Pi Zero, using our regular camera ribbon cables.
実際に、先日のMaker Faire Tokyo 2024のKSYブースでは、Raspberry Pi Ltdから来ていたMattさんがAI Cameraのデモを持参して展示していて、ここではPi Zero(おそらく2W)が使用されていました。

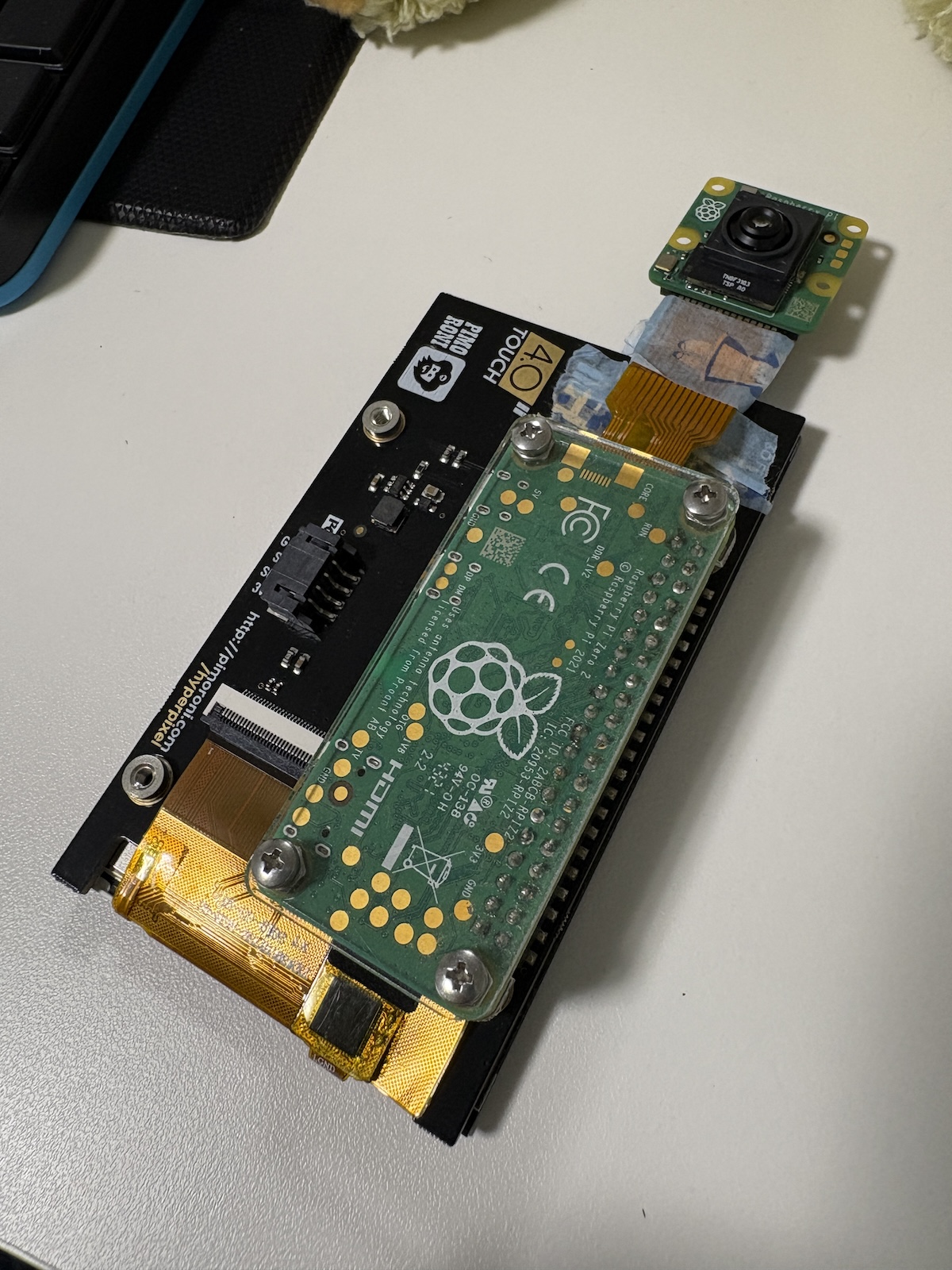
というわけでわたしもPi Zero 2Wで環境を再現してみました。ディスプレイはPimoroniのHyperPixel4を使用しました。

裏面。こちらのカメラの固定には簡易的に、厚紙とマスキングテープを使用しています。
MicroSDカードのセットアップは、あらかじめRaspberry Pi 5で済ませて、動作も確認してからPi Zero 2Wに移しました。が、どうやらこれではPiZero 2W上のRaspberry Pi OSがカメラを自動認識できないようです。ドキュメントのチュートリアルでも、「少し手を加えれば」という一文があるので、どうやら手を加える必要がありそうです。
With minor changes, you can follow these instructions on other Raspberry Pi models with a camera connector, including the Raspberry Pi Zero 2 W and Raspberry Pi 3 Model B+.
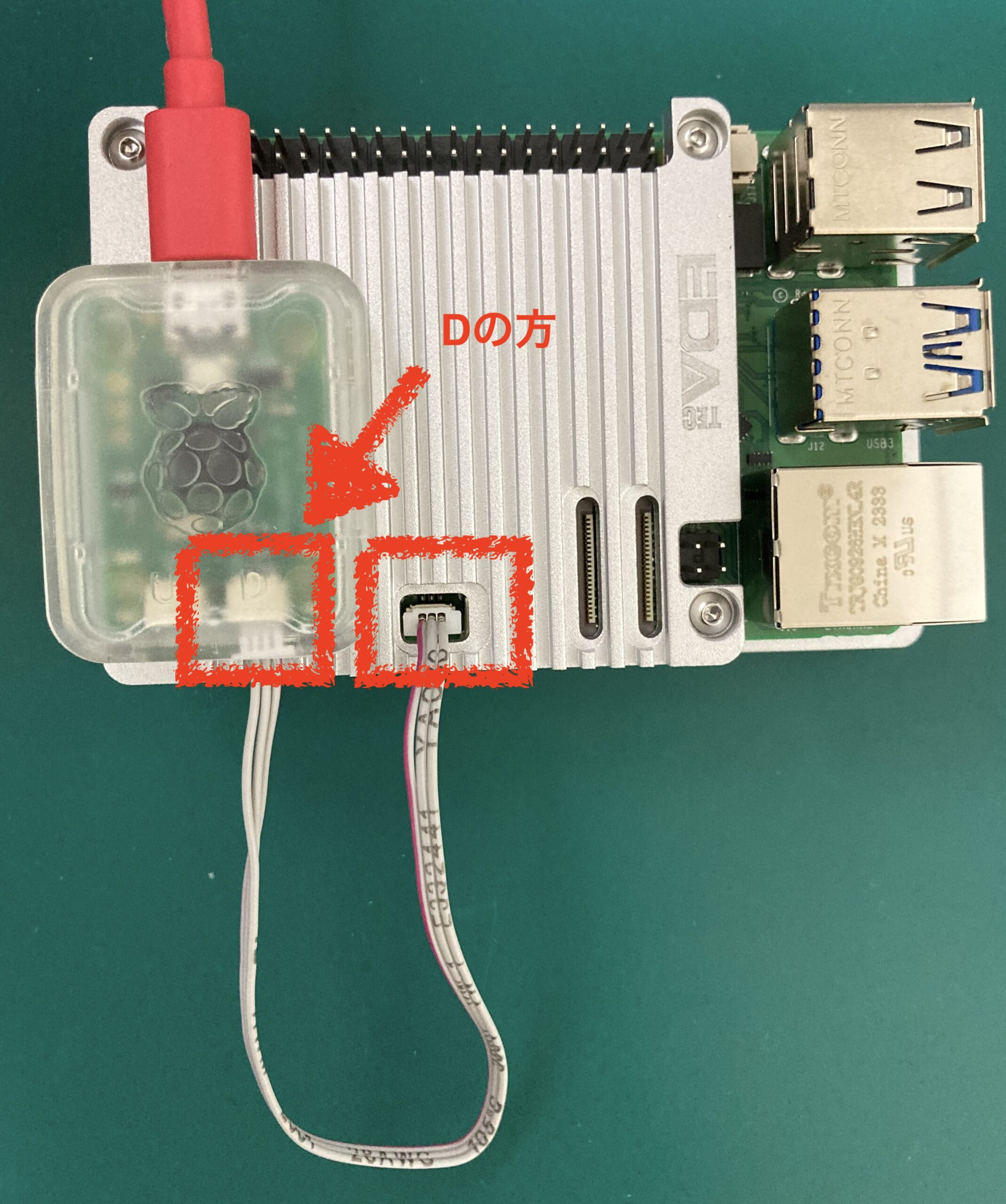
ドキュメントには記載がありませんが、はカメラを手動でも認識できるようにすれば良いので、つまり、/boot/firmware/config.txtに設定を追記すればOKです。
# この設定をコメントアウトする
# Automatically load overlays for detected cameras
#camera_auto_detect=1
# ファイル末尾の[all]以下に追記
[all]
dtoverlay=imx500
# これはHyperPixel4用の設定
dtoverlay=vc4-kms-dpi-hyperpixel4設定後にOSを再起動をしたら無事に認識してくれたので、試してみた結果がこちら。
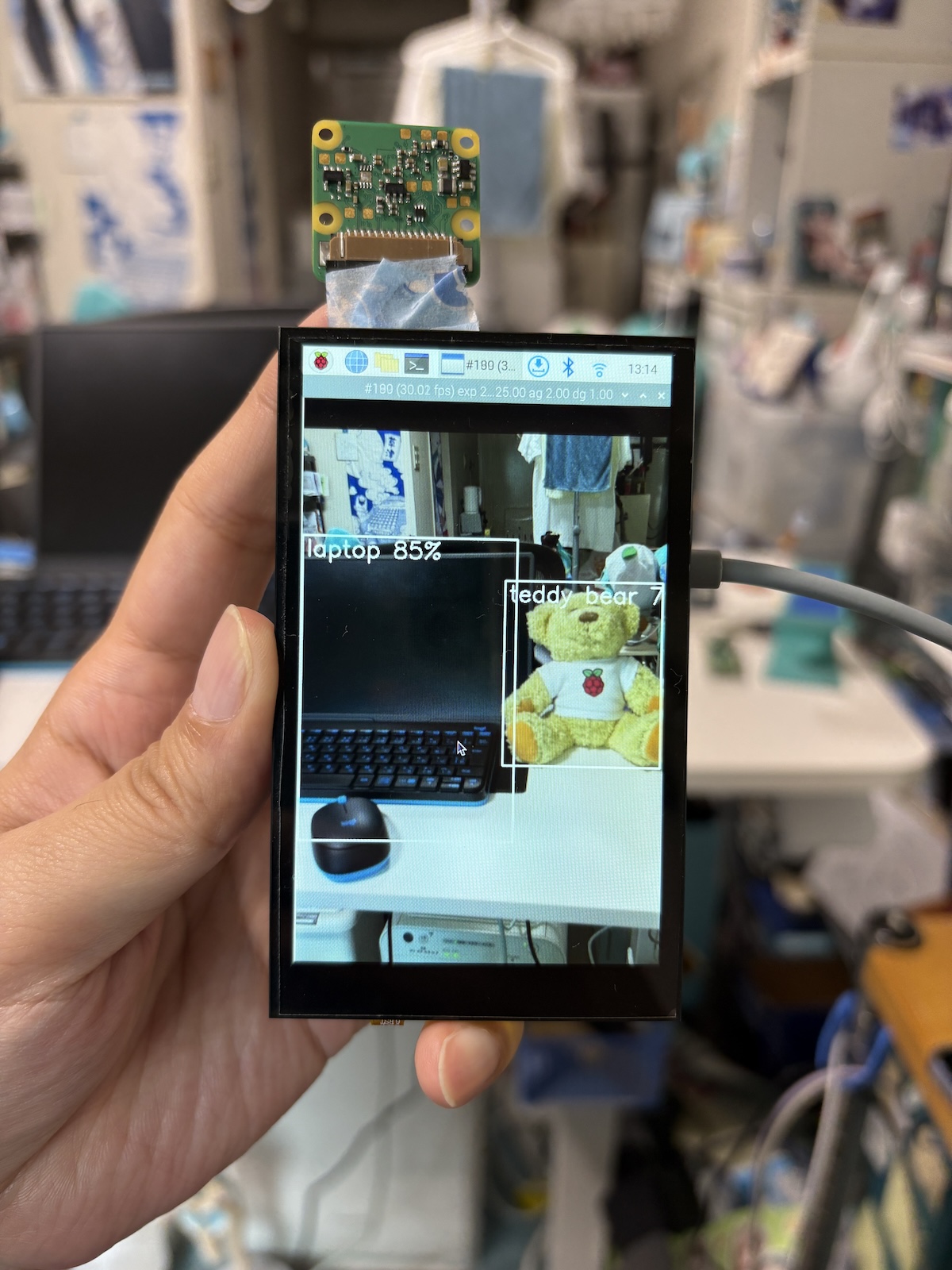
もちろん、PiZero 2WはRAMが512MBしかないため、デスクトップが起動するまで待たされたりしますが、起動してしまえば、動画のように物体検出の結果がすぐにでてきます。
AI KitとAI Cameraどちらにしよう?
公式のリリースでも言及されていますが、AI Kitはパフォーマンスの代わりにPi 5限定である一方、AI Cameraはカメラと一体になっているため用意するものがこれ一個で済んで、Pi 5以外のほぼすべてのRaspberry Piで使えます。
個人的には、手軽な入門としては、後者のほうが手軽そうな印象をもちました。
入手するには?
AI Cameraは各リセーラーを通じて販売される見込みです。観測している範囲では、KSYさんと、イギリスのPimoroniは未入荷です。スイッチサイエンスだけ昨晩に販売がありましたが、初回入荷分は少量だったようで、一瞬で完売してしまったようです(わたしはなんとか間に合って購入できました)。1万3千円ほどするのに、皆さん判断が早い……!!
そう言った状況のため、例によって当面入手が難しいと予想されます。AI Cameraが欲しい方は、リセーラーさんの入荷通知機能や、Pre-Orderを活用してみてください。