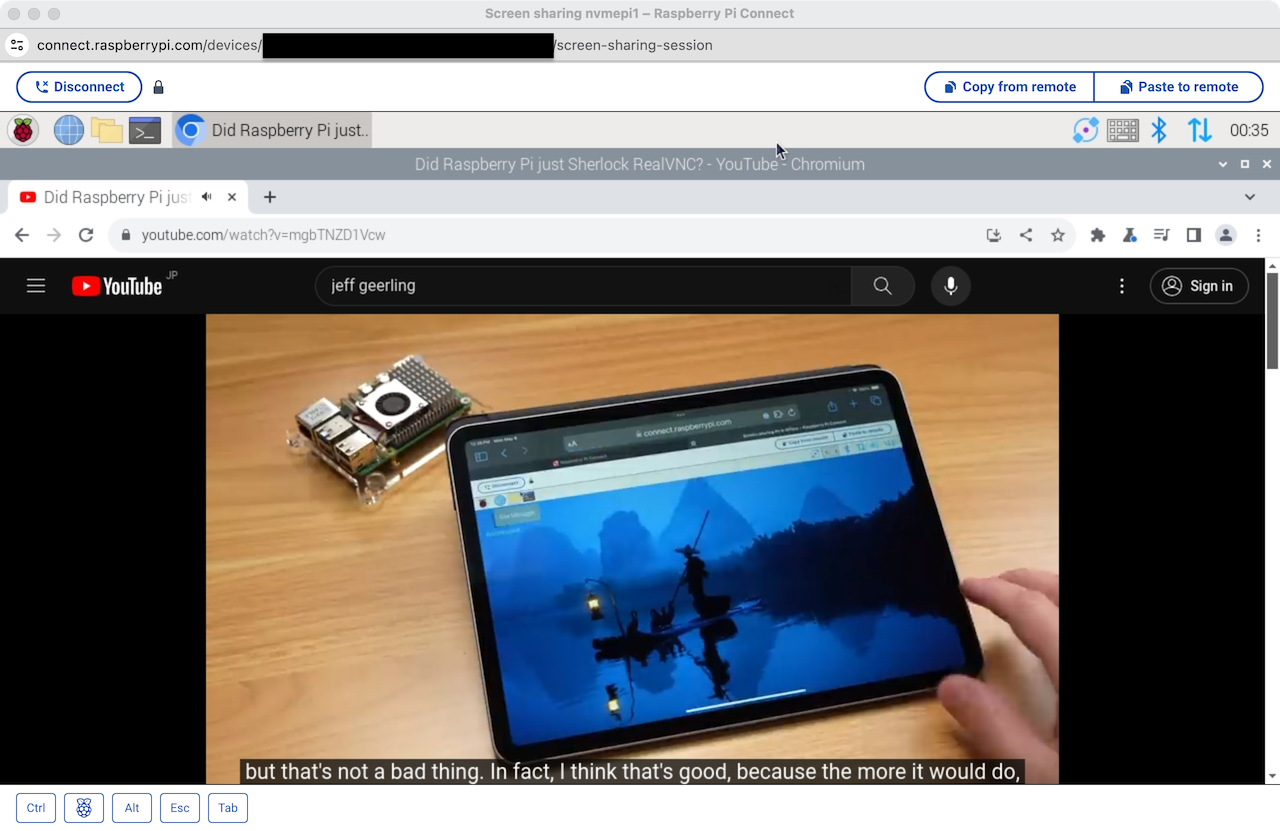
私(あっきぃ)は、Raspberry Pi 5を使ってプレゼンテーション。操作は無線マウスのみで操作という、ちょっと冒険的な環境でした。
テーマは1GB RAMのRaspberry Pi 4 or 5を使うとどんな感じなのかについて、8GB RAMなどのモデルを擬似的に1GB RAMに制限して、ブラウザなどの起動や動作を確かめるレポートをしました。ちなみに、発表に使用したRaspberry Pi 5ももちろん1GBに制限していました(スライドデータはPDF)。
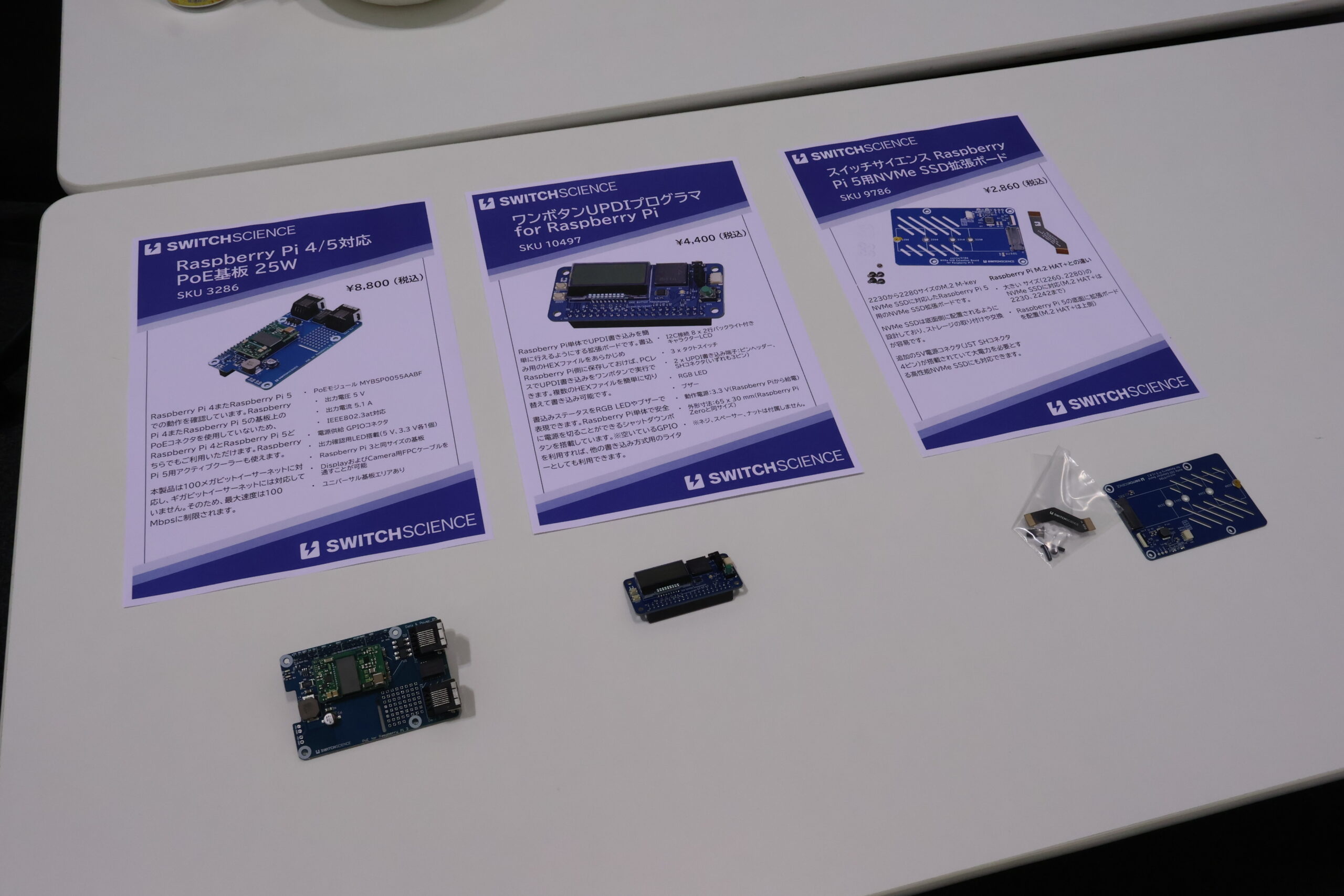
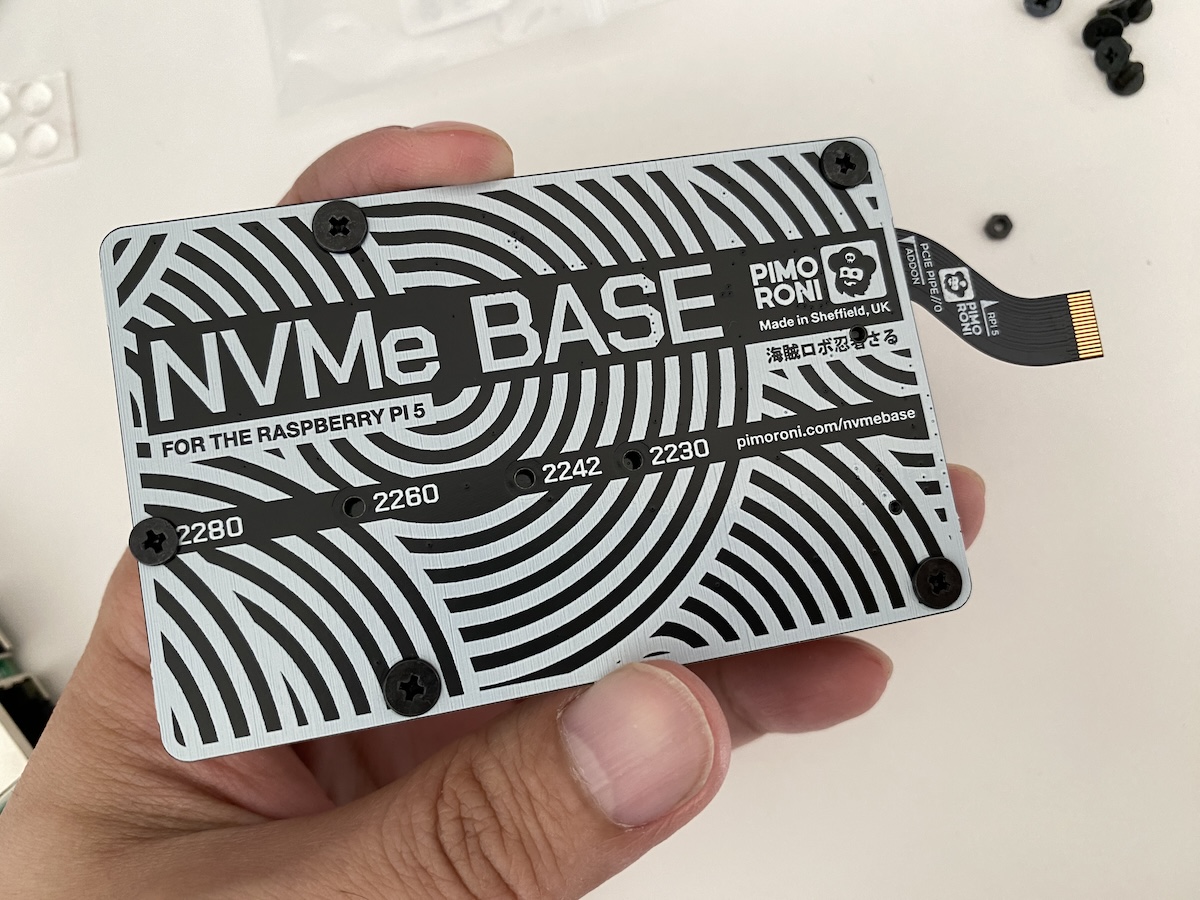
スイッチサイエンスさんの製品の展示。Raspberry Pi 4/5に対応したPoE基板や、M.2 と年拡張ボード、スイッチサイエンスさんのスタッフさんが欲しくて製作したというワンボタンUPDIプログラマボードを展示いただきました。
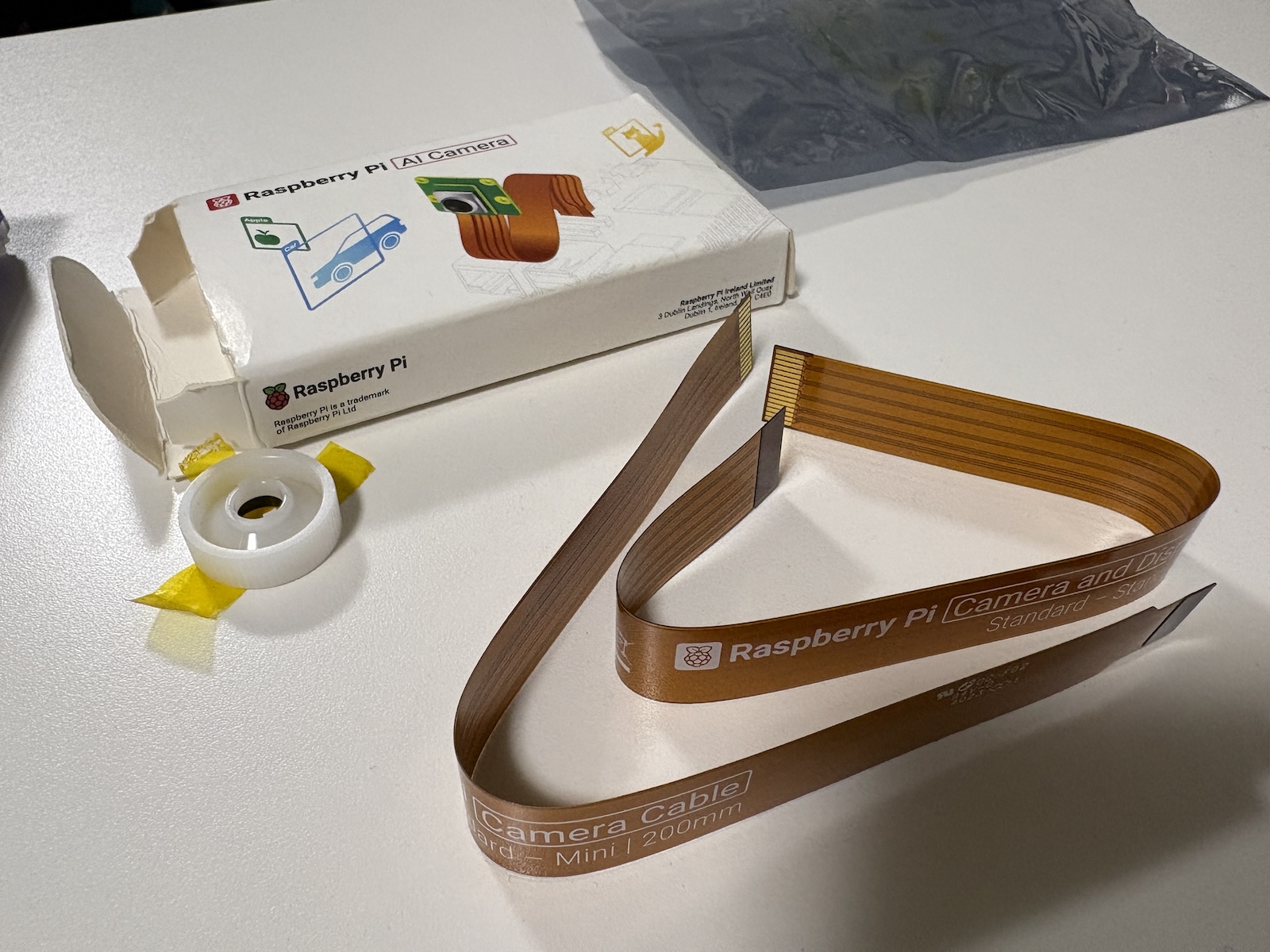
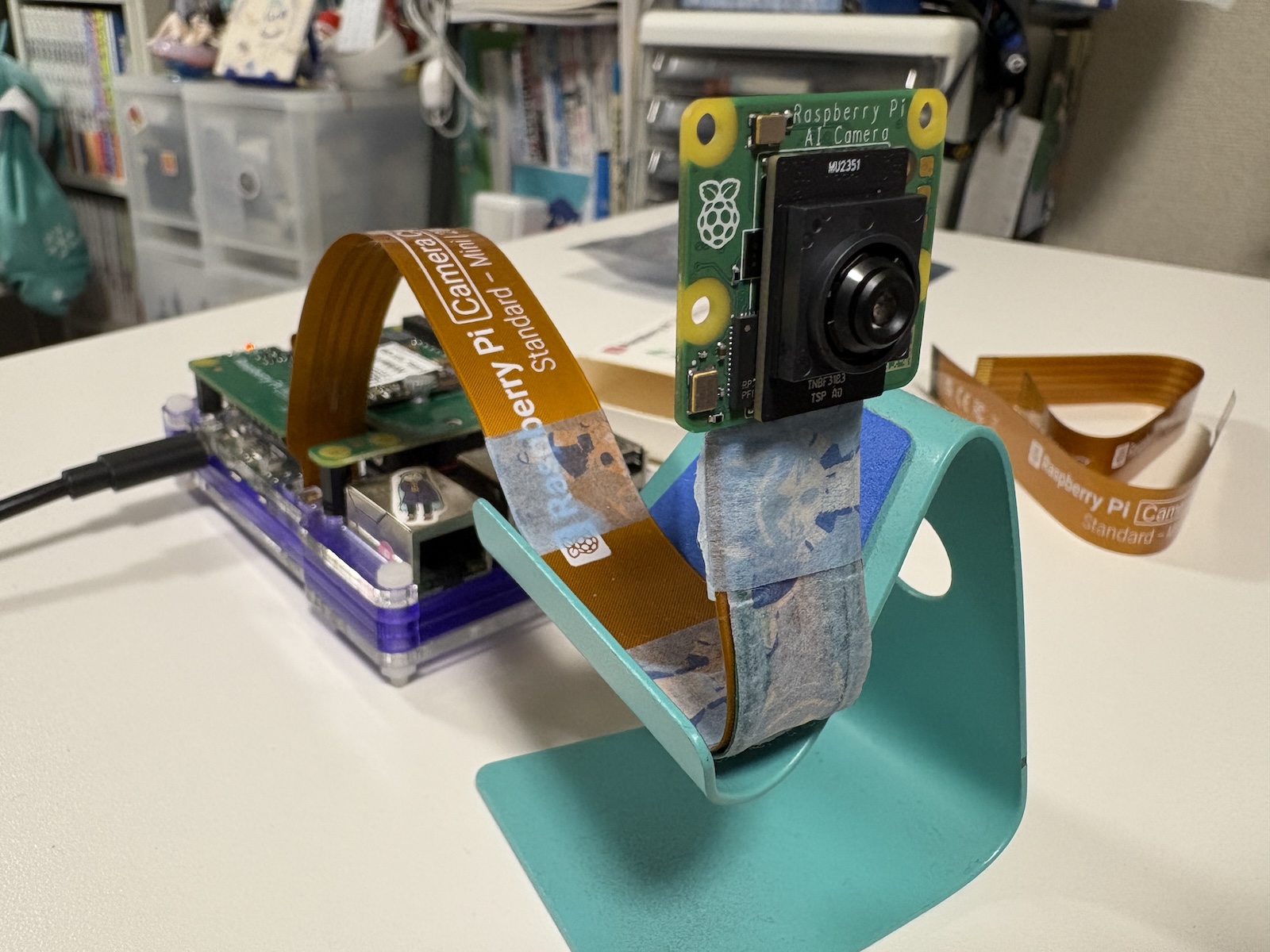
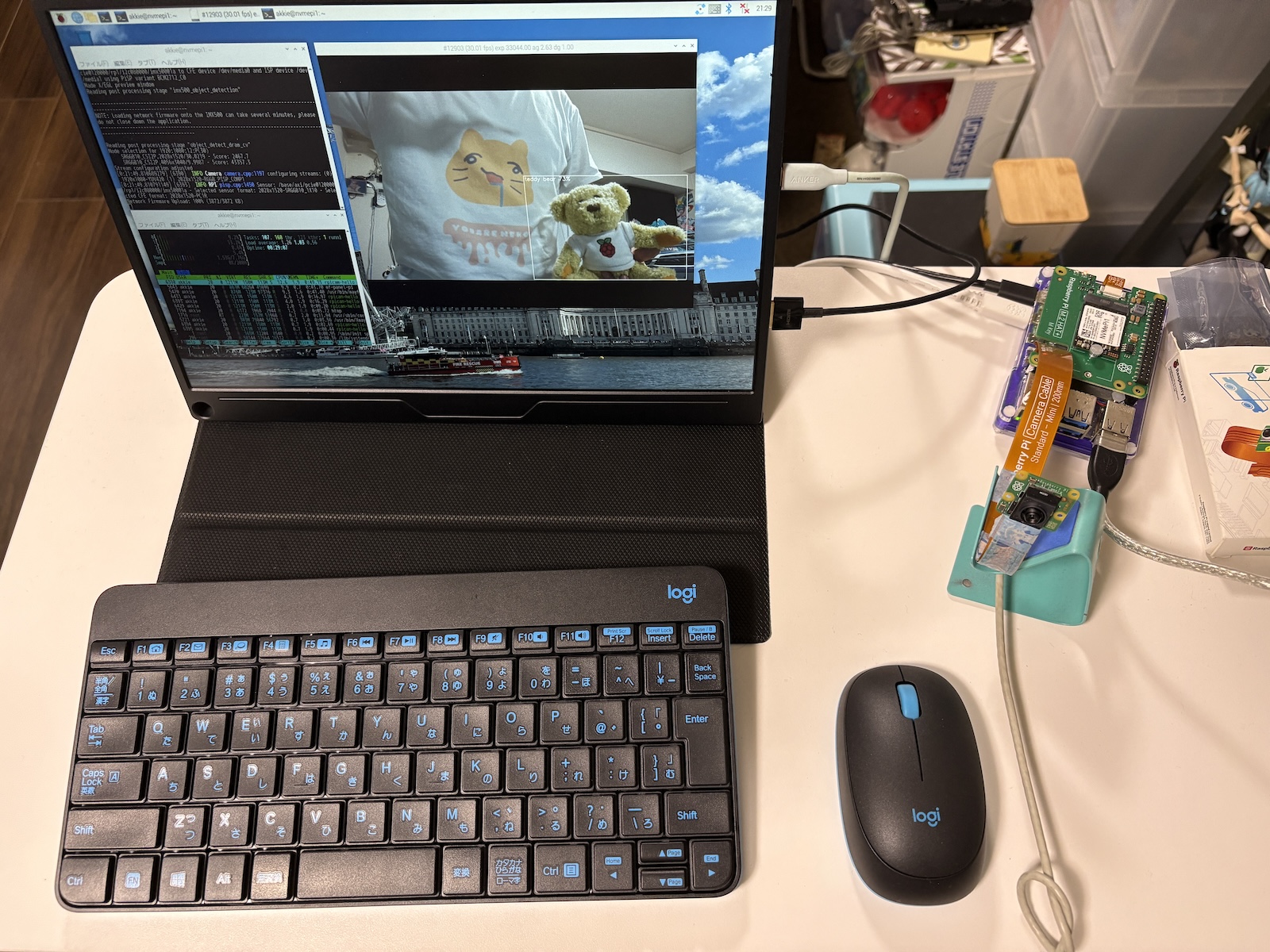
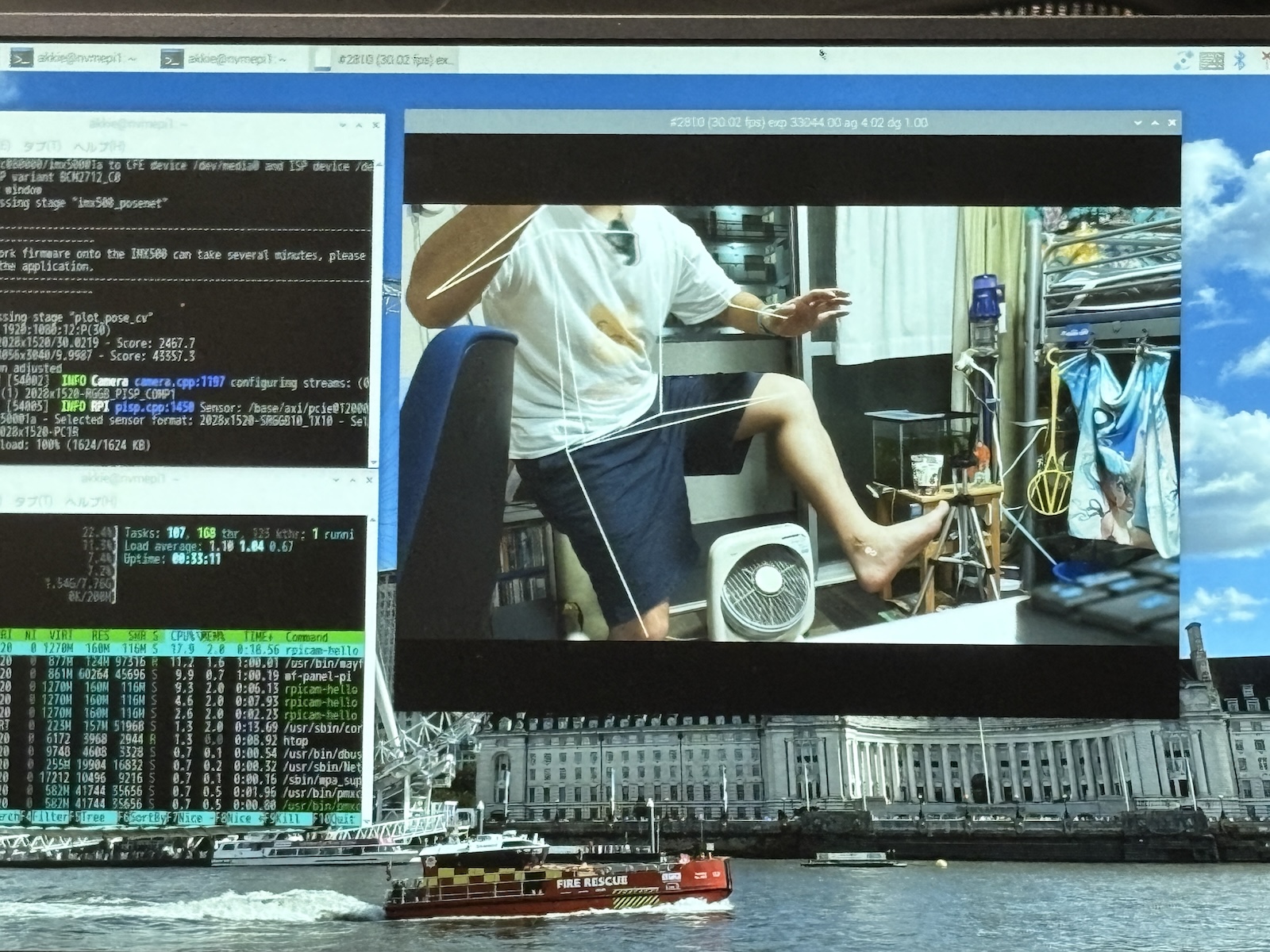
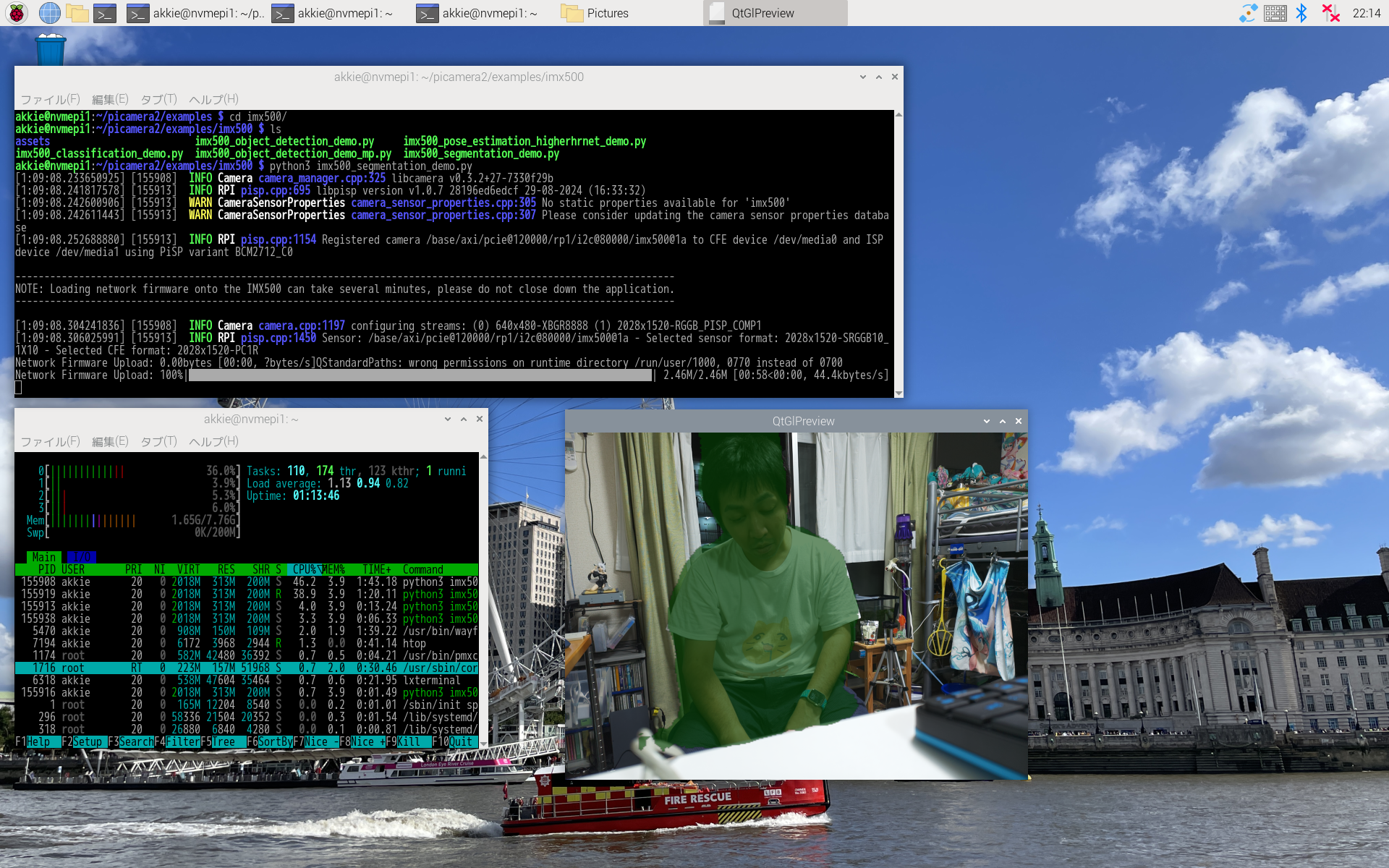
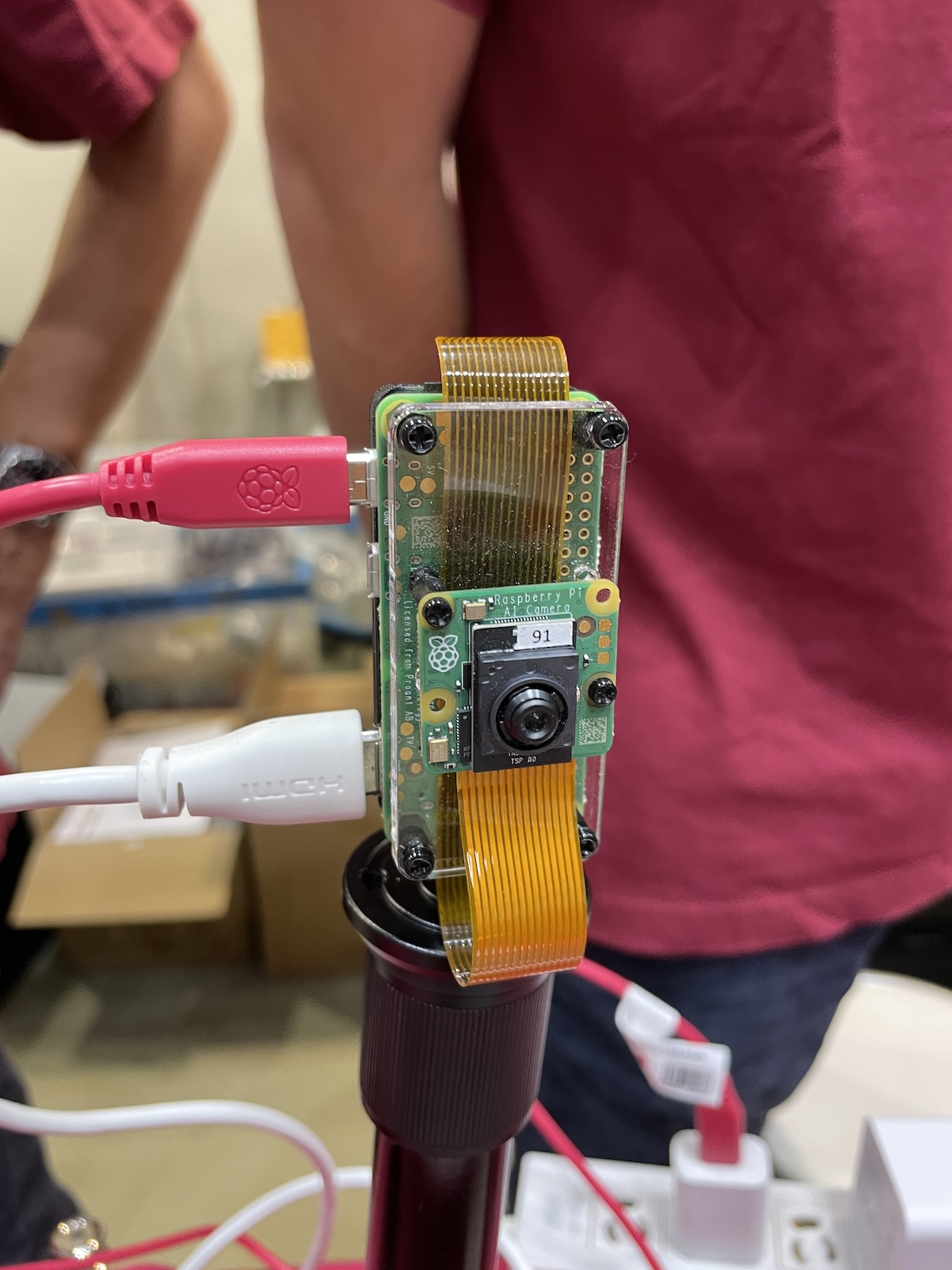
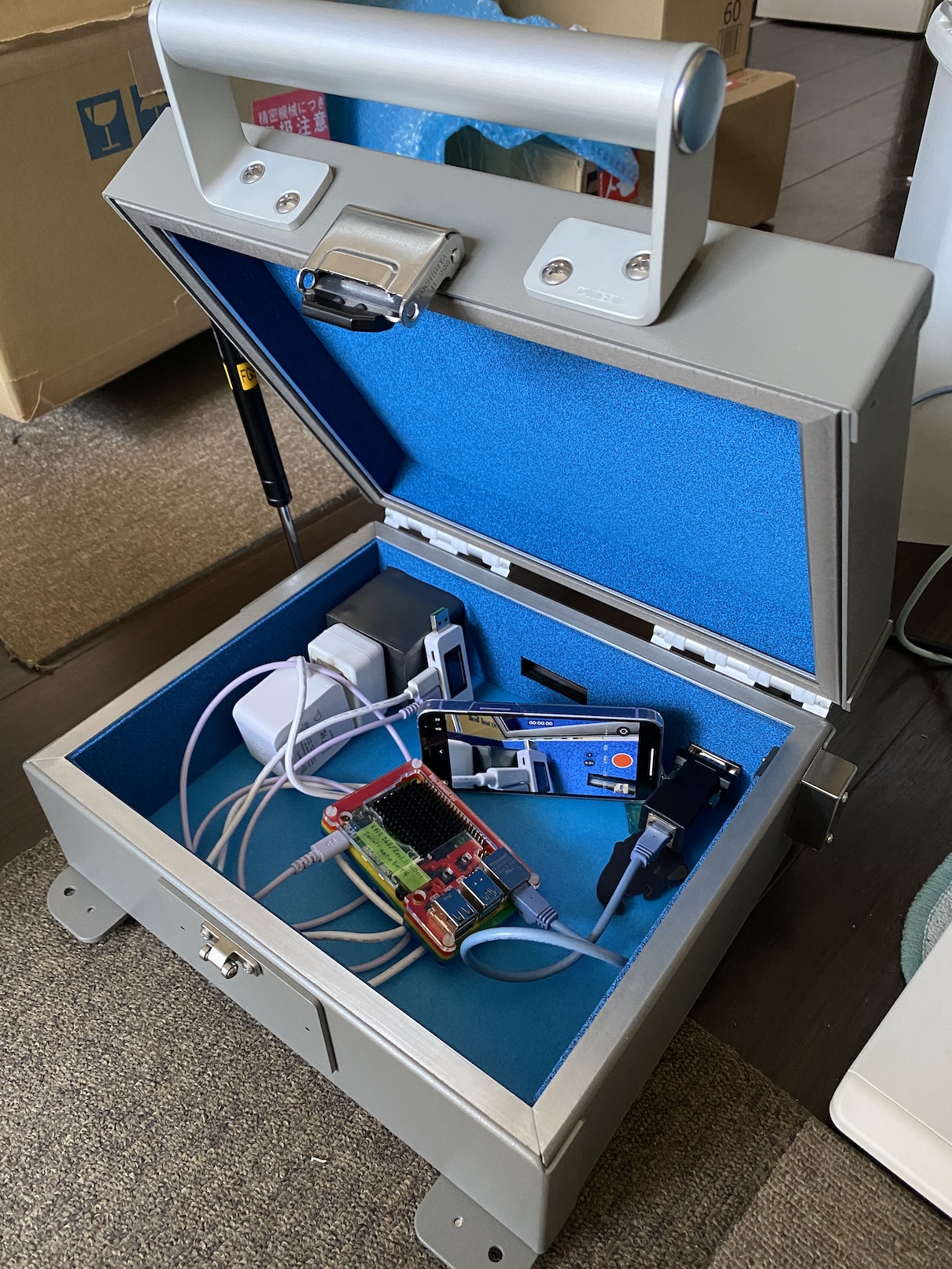
実際に動かしてみましょう。まずはRaspberry Pi 5を使用して、いろいろなサンプルを動かしてみました。カメラは、カメラケーブルにマスキングテープで針金(ケーブルを束ねるのに使われているネジネジのやつ)を貼り付けて、フレキシブルなケーブルにするハックと、スマホスタンドの組み合わせで固定しました。
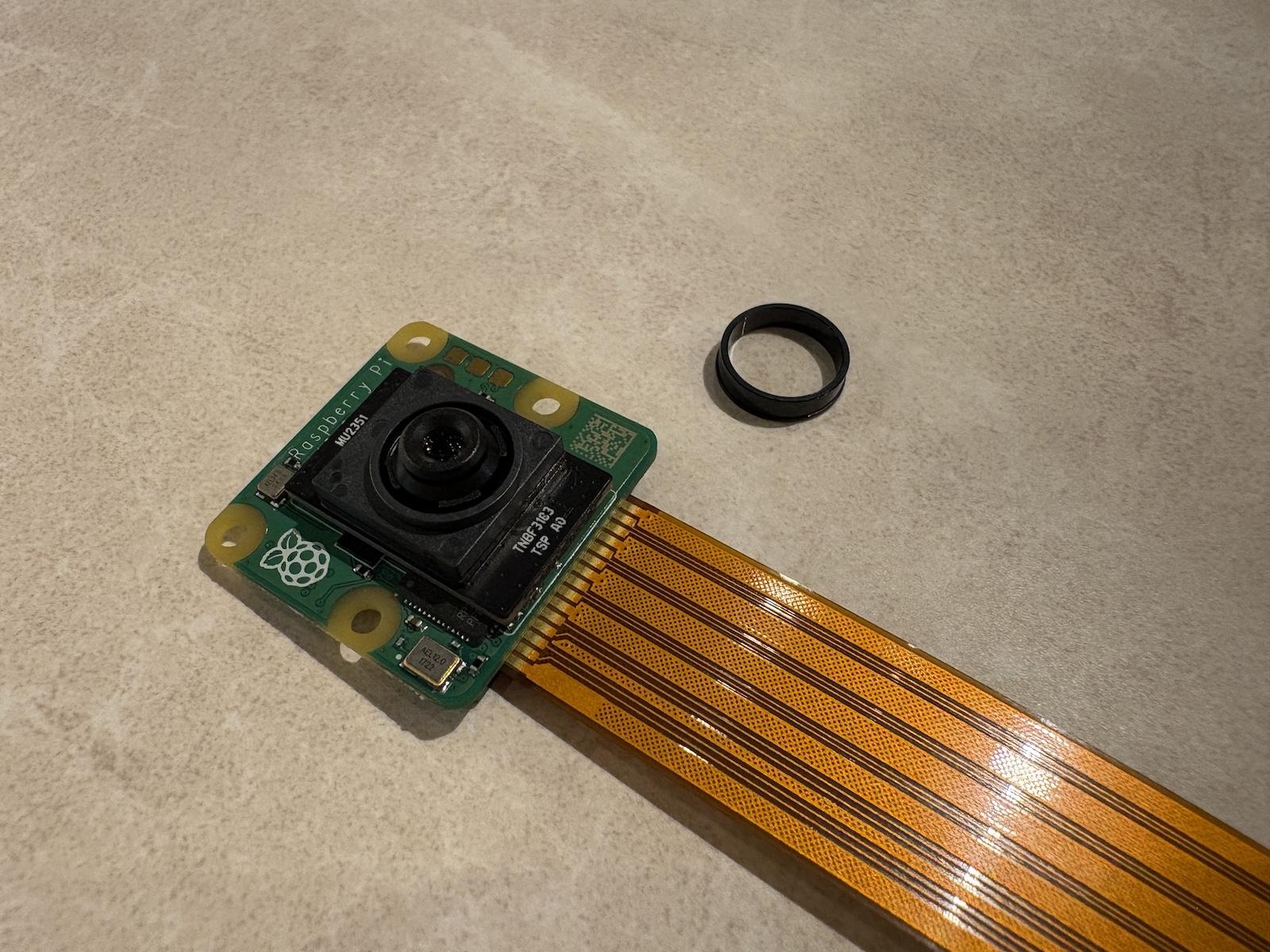
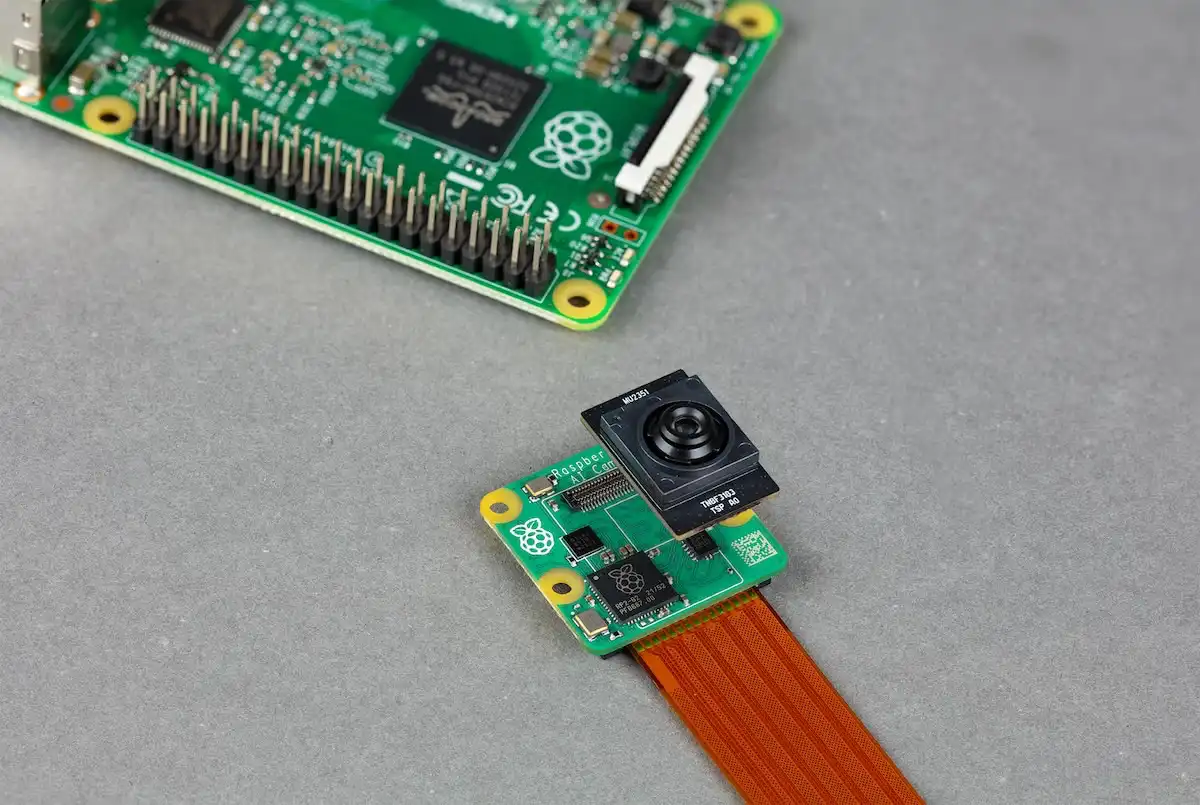
The AI Camera can be connected to all Raspberry Pi models, including Raspberry Pi Zero, using our regular camera ribbon cables.
実際に、先日のMaker Faire Tokyo 2024のKSYブースでは、Raspberry Pi Ltdから来ていたMattさんがAI Cameraのデモを持参して展示していて、ここではPi Zero(おそらく2W)が使用されていました。
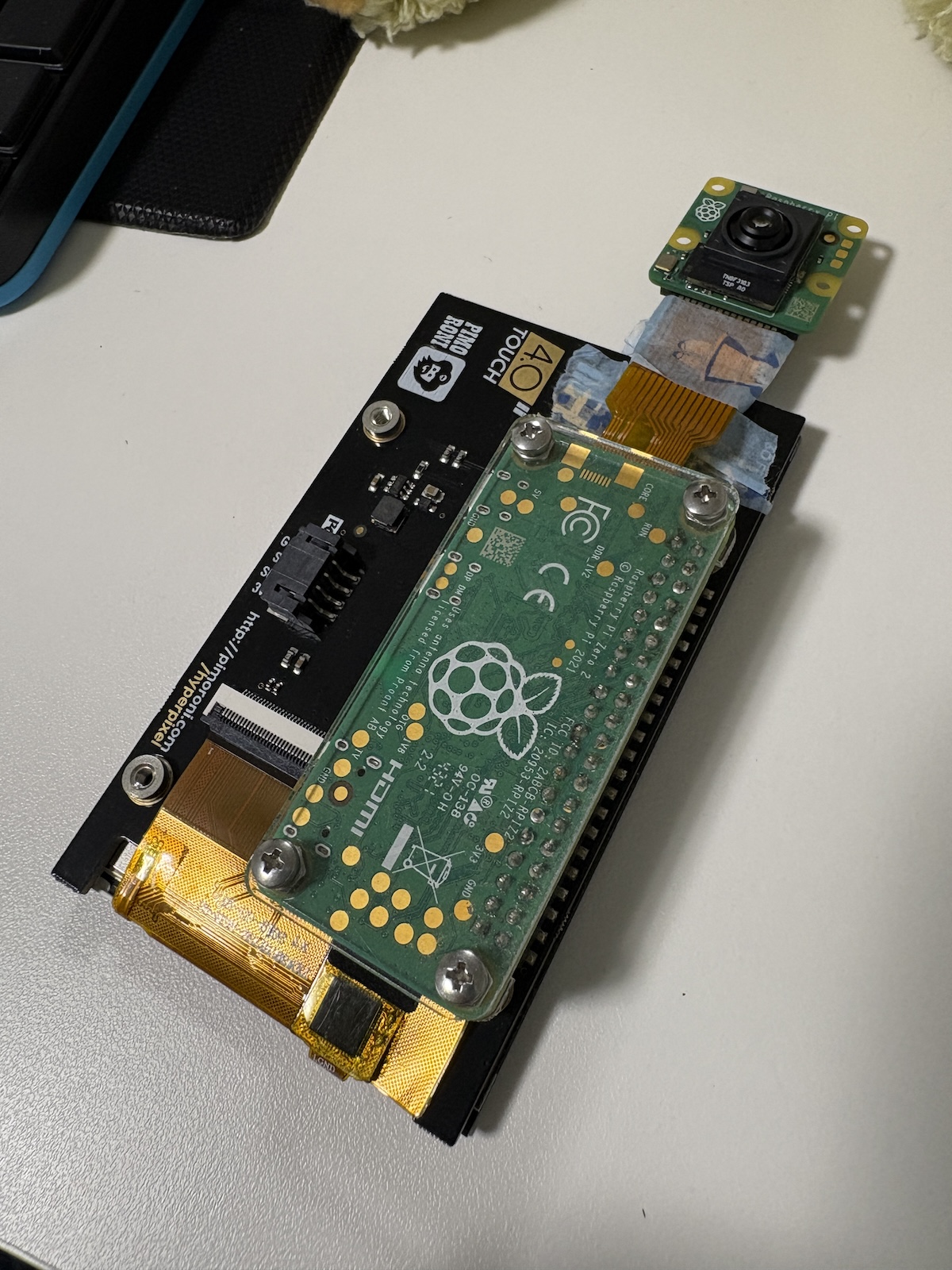
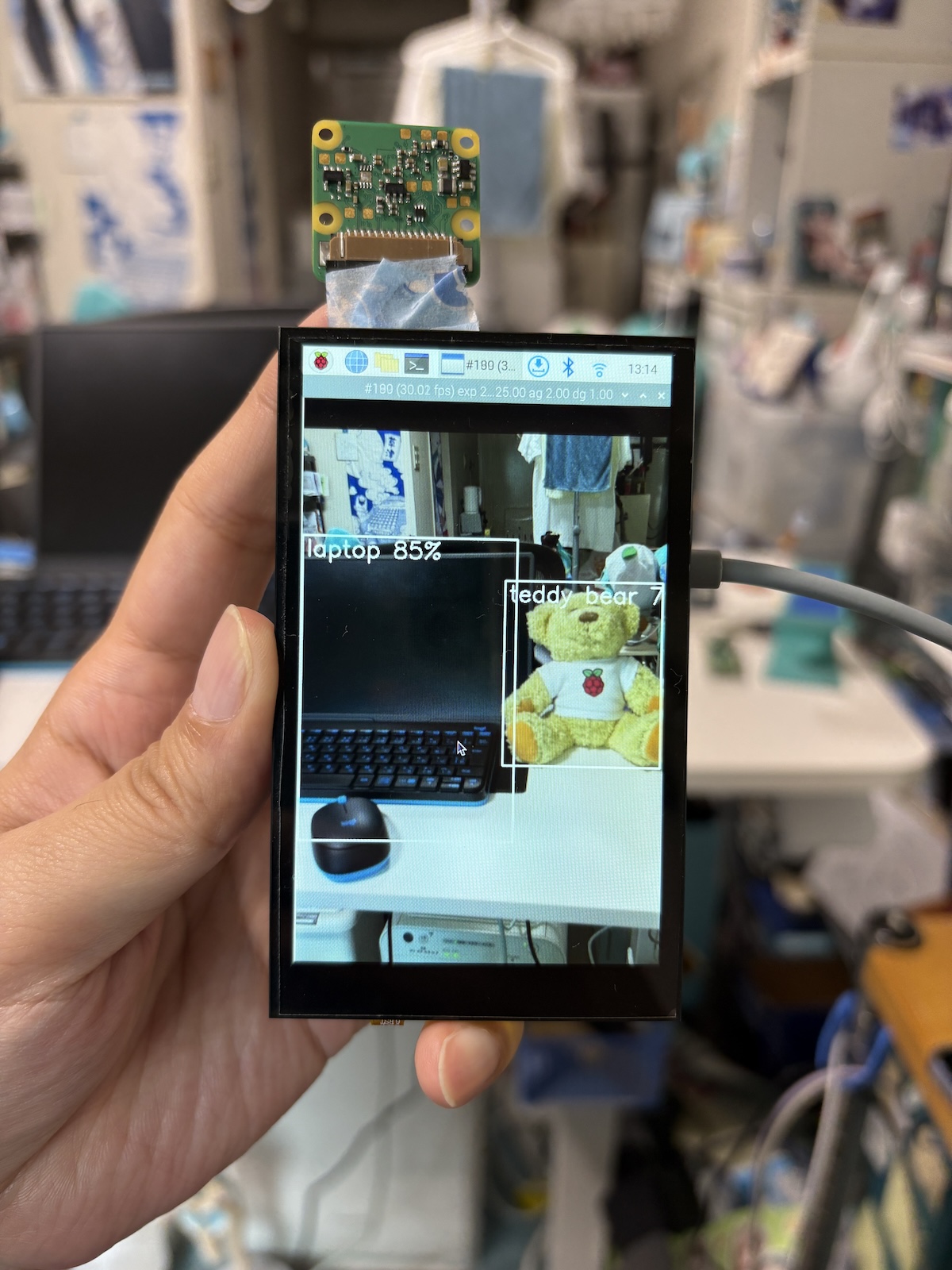
というわけでわたしもPi Zero 2Wで環境を再現してみました。ディスプレイはPimoroniのHyperPixel4を使用しました。
裏面。こちらのカメラの固定には簡易的に、厚紙とマスキングテープを使用しています。
MicroSDカードのセットアップは、あらかじめRaspberry Pi 5で済ませて、動作も確認してからPi Zero 2Wに移しました。が、どうやらこれではPiZero 2W上のRaspberry Pi OSがカメラを自動認識できないようです。ドキュメントのチュートリアルでも、「少し手を加えれば」という一文があるので、どうやら手を加える必要がありそうです。
With minor changes, you can follow these instructions on other Raspberry Pi models with a camera connector, including the Raspberry Pi Zero 2 W and Raspberry Pi 3 Model B+.
AI Cameraは各リセーラーを通じて販売される見込みです。観測している範囲では、KSYさんと、イギリスのPimoroniは未入荷です。スイッチサイエンスだけ昨晩に販売がありましたが、初回入荷分は少量だったようで、一瞬で完売してしまったようです(わたしはなんとか間に合って購入できました)。1万3千円ほどするのに、皆さん判断が早い……!!
日本ではRaspberry Pi 5の発売はまだですが、先週末には日本の技適に関する証書PDFがRaspberry Piのポータルにアップロードされ、進捗が見えてきています。残念ながらこのPDFをもって日本で買ったり使ったりして良いことにはなっておらず、製品(またはパッケージ等)にマークと番号が印字されたものが販売開始されて初めて適法に利用できるようになるため、もう少しの辛抱です。
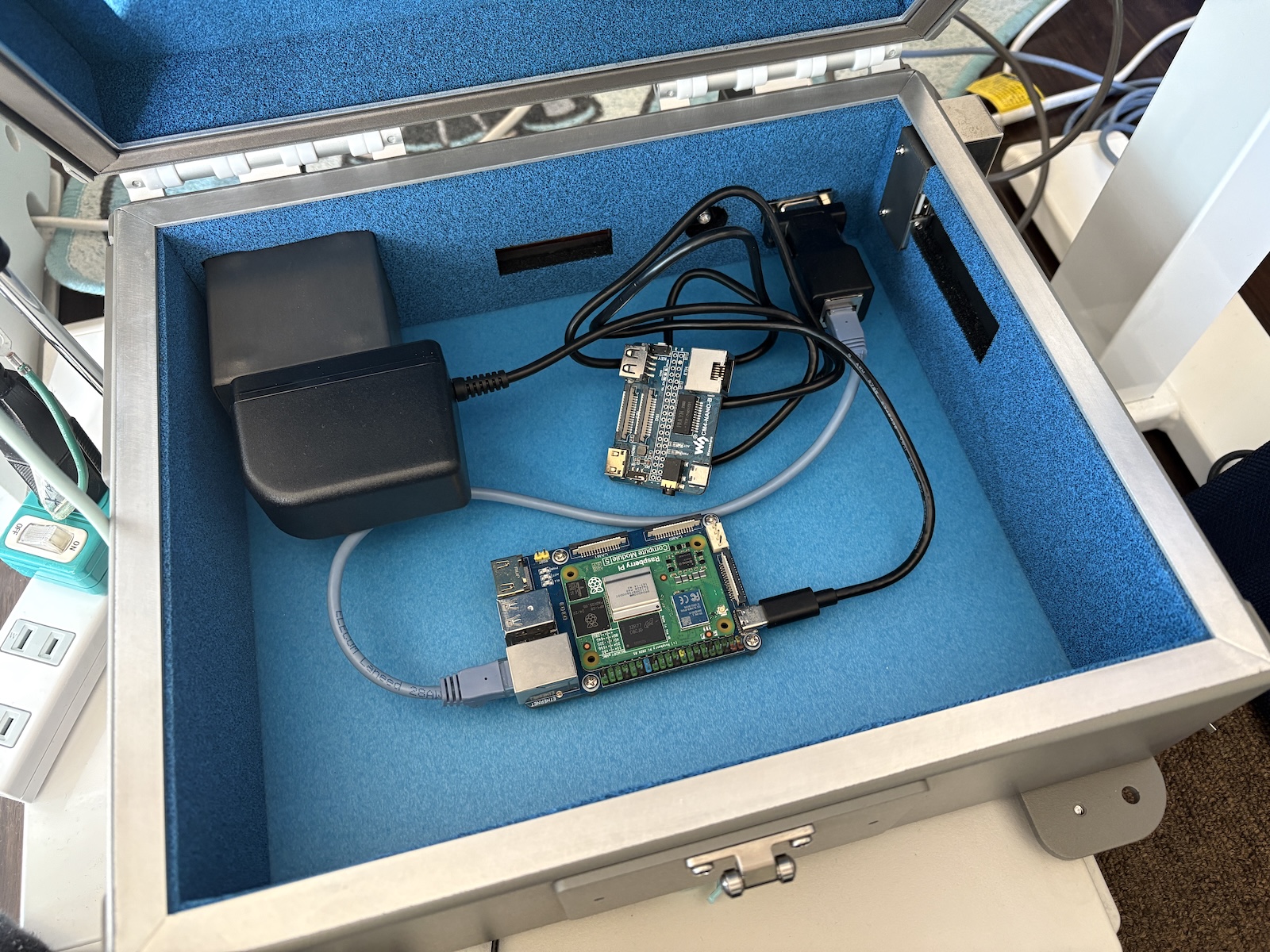
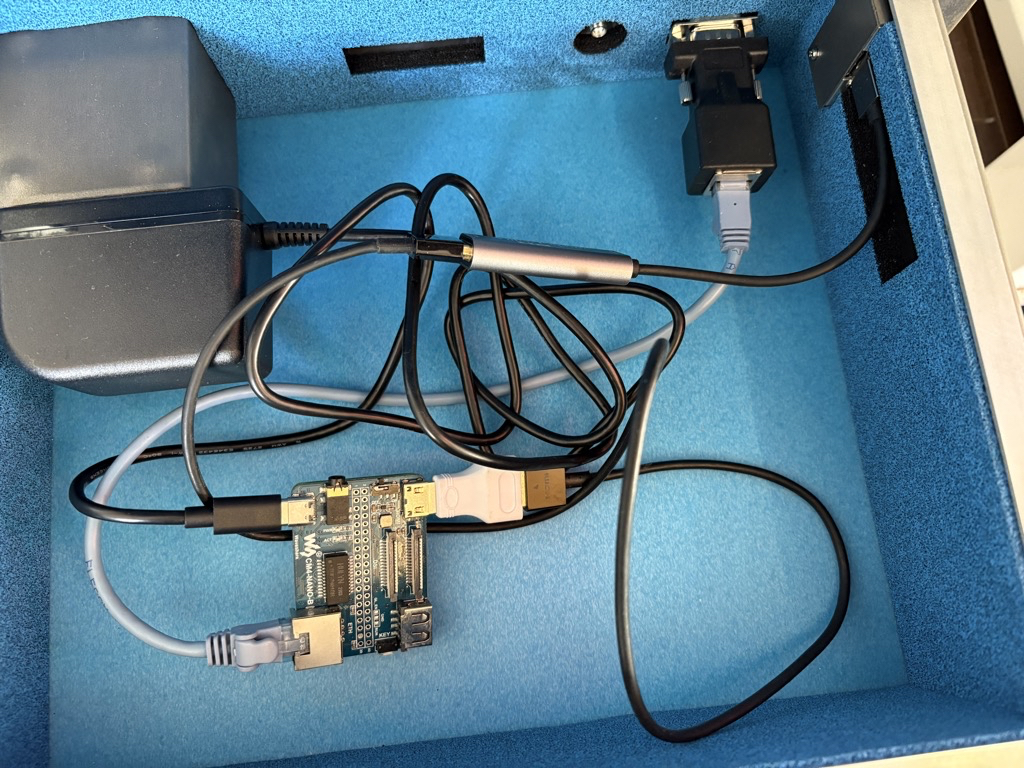
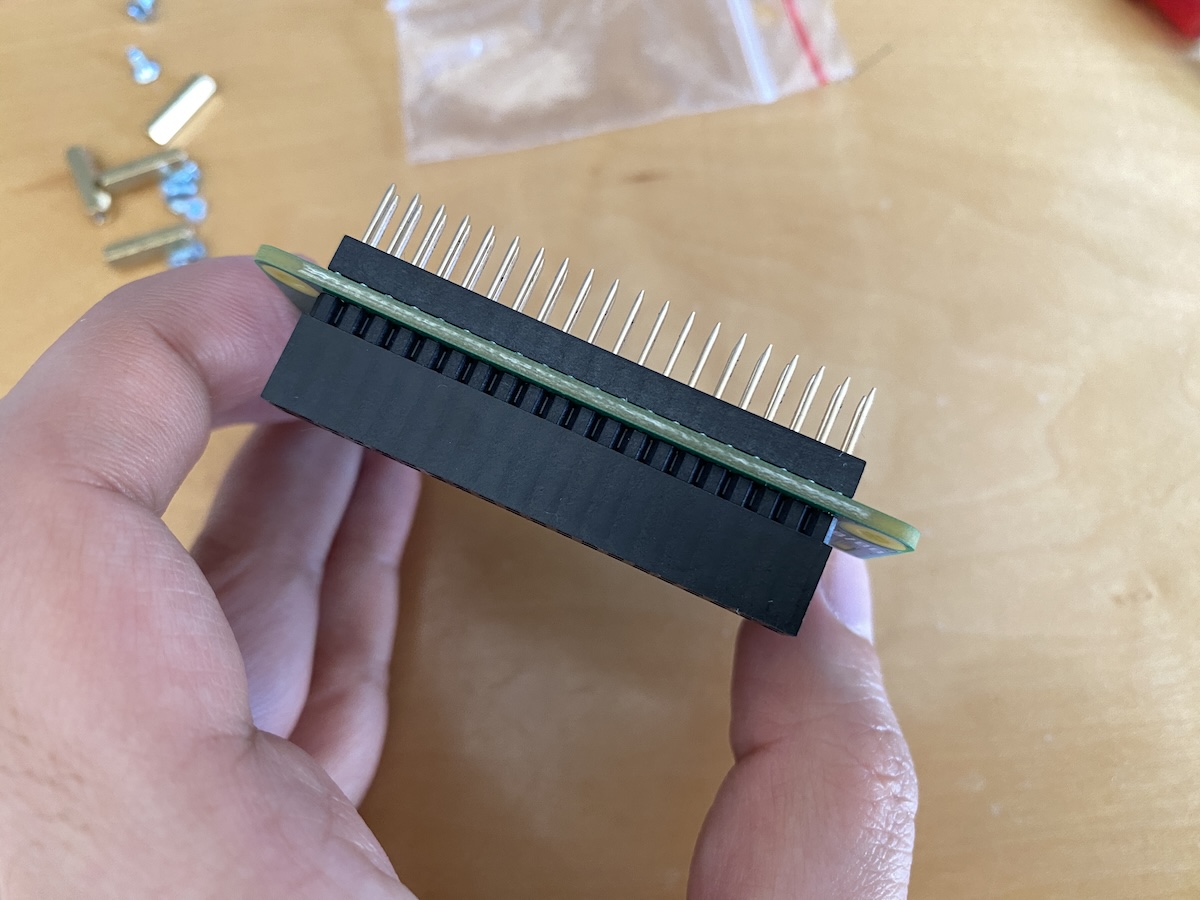
今回遊ぶ内容的にはどれを使用しても同じですが、今回はEthernet HATの方を使用しました。こちらの場合別途Raspberry Pi Picoが必要になりますが、EVB-Picoよりも全長が少し短くなってコンパクトになります。また、EVB-Picoと比べるとボード上の通電LEDがPicoで覆い隠せるため、実運用に投入するとLEDが眩しくて邪魔という問題が緩和できます。まあ、EVB-PicoのEVBはEValuation Boardの略だと思うので、実運用に適しているのかは不明ですが……。
import time
import usb_hid
from adafruit_hid.mouse import Mouse
mouse = 0
while not mouse:
try:
mouse = Mouse(usb_hid.devices)
except:
pass
time.sleep(1)
for i in range(0, 8):
mouse.move(x=20, y=20)
time.sleep(0.25)
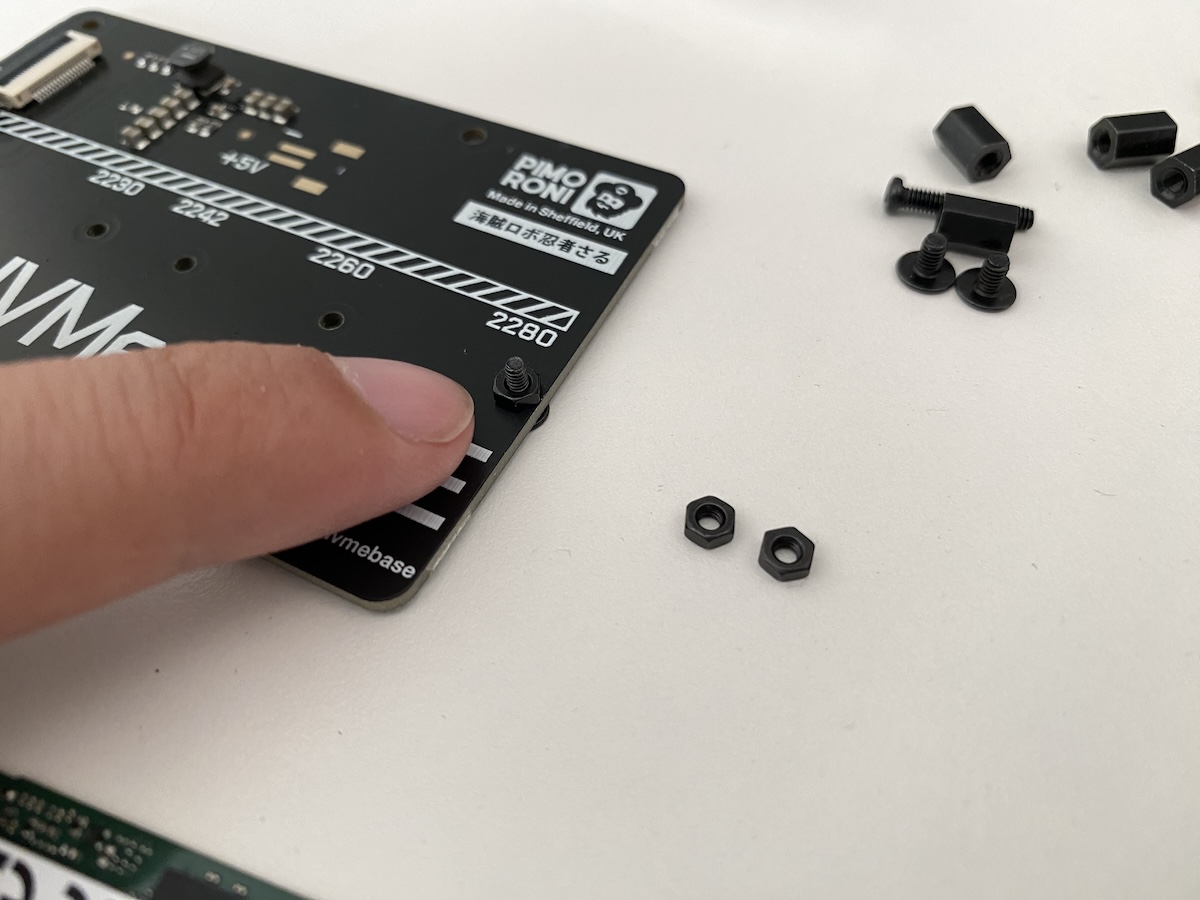
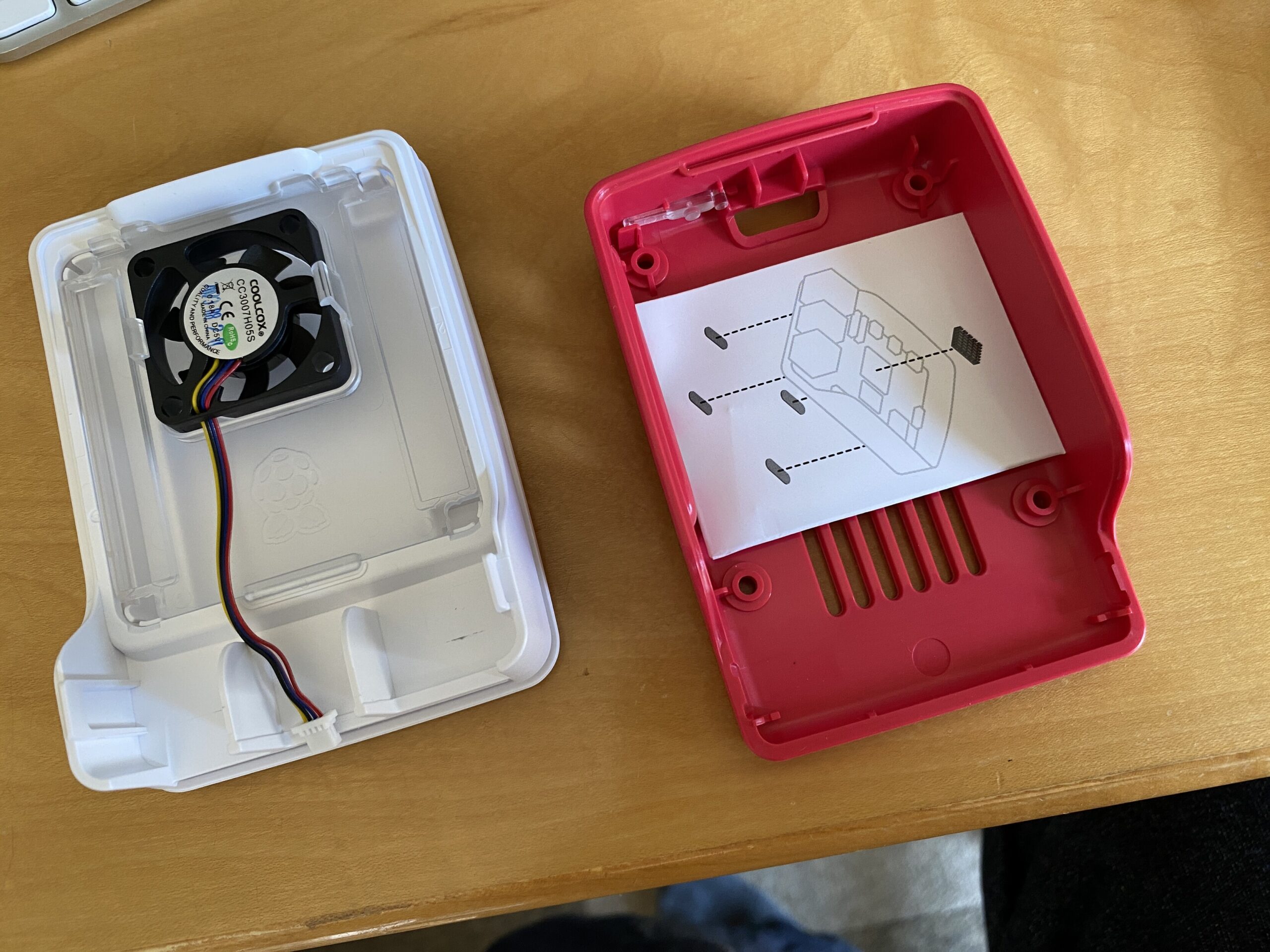
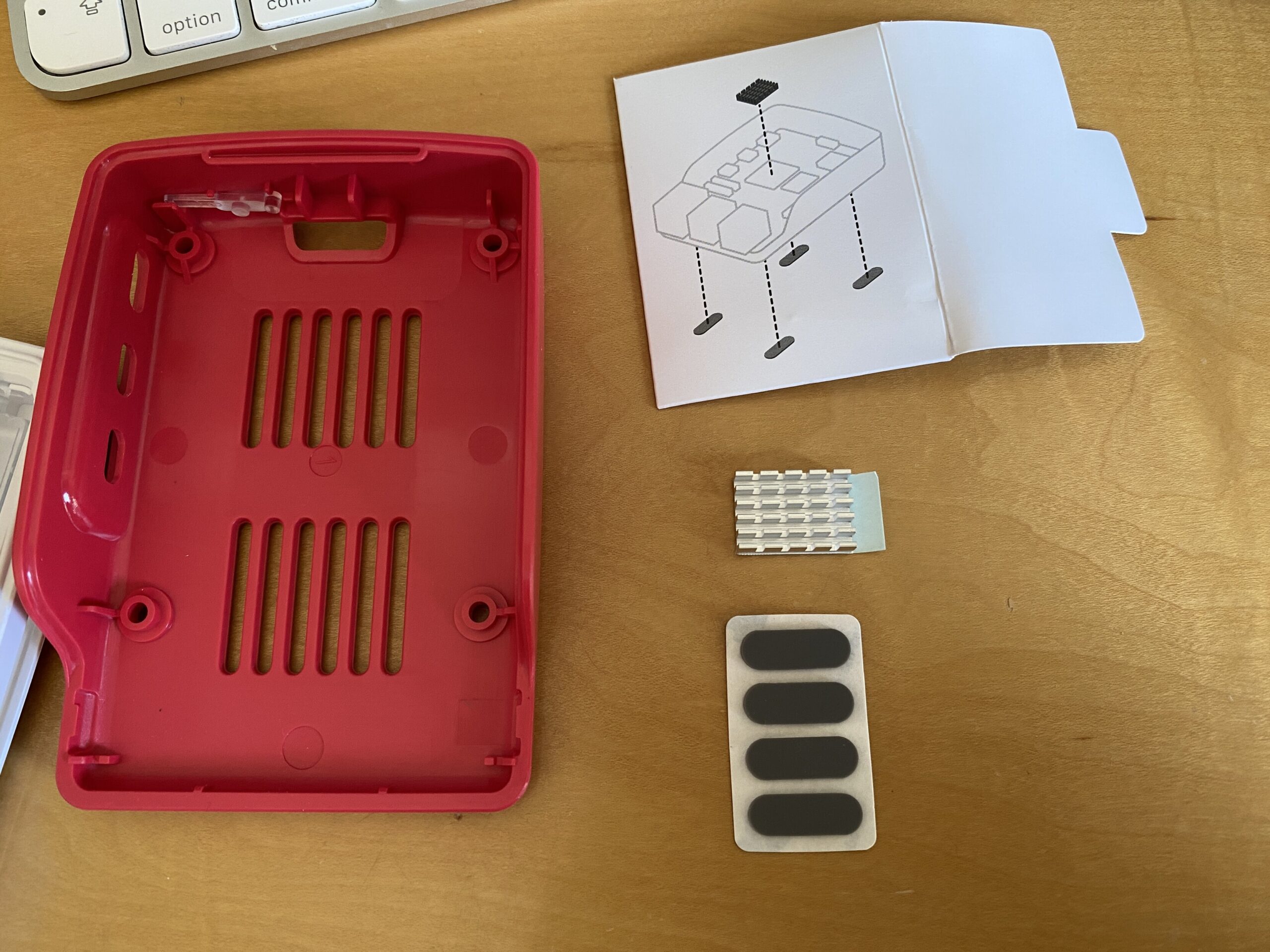
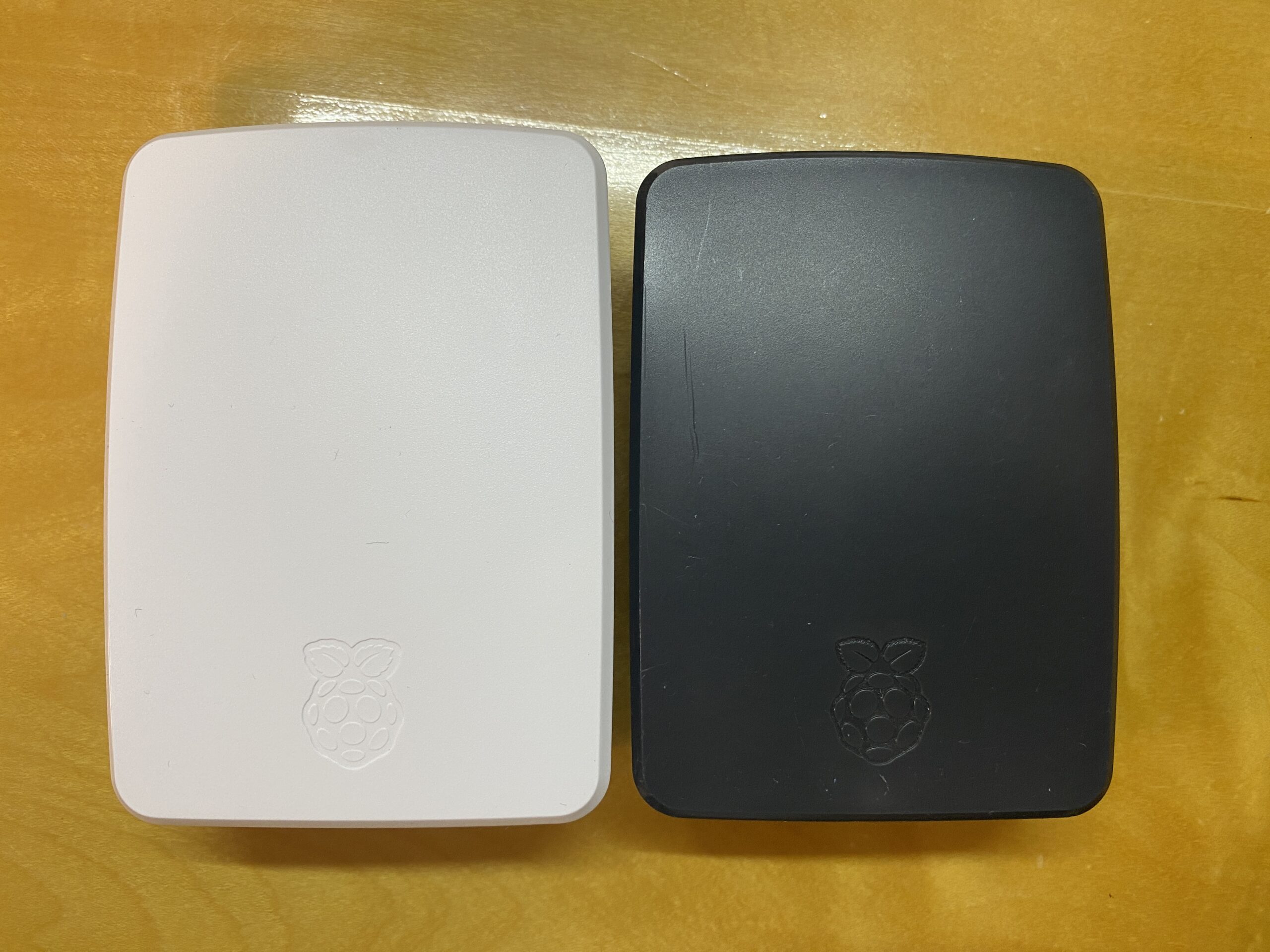
Pimoroniで予約していたケース””だけ””が届きました。PiBowと公式ケースで、いずれもサンプルではなく、いずれRaspberry Pi 5の技適が通った時のために個人用に購入したものです。……私はPi 5を2台買うんだろうか🤔ちなみに、写真のPi 5はサンプルですが。今回は話題的に通電しない済むので技適等は無関係ですね。
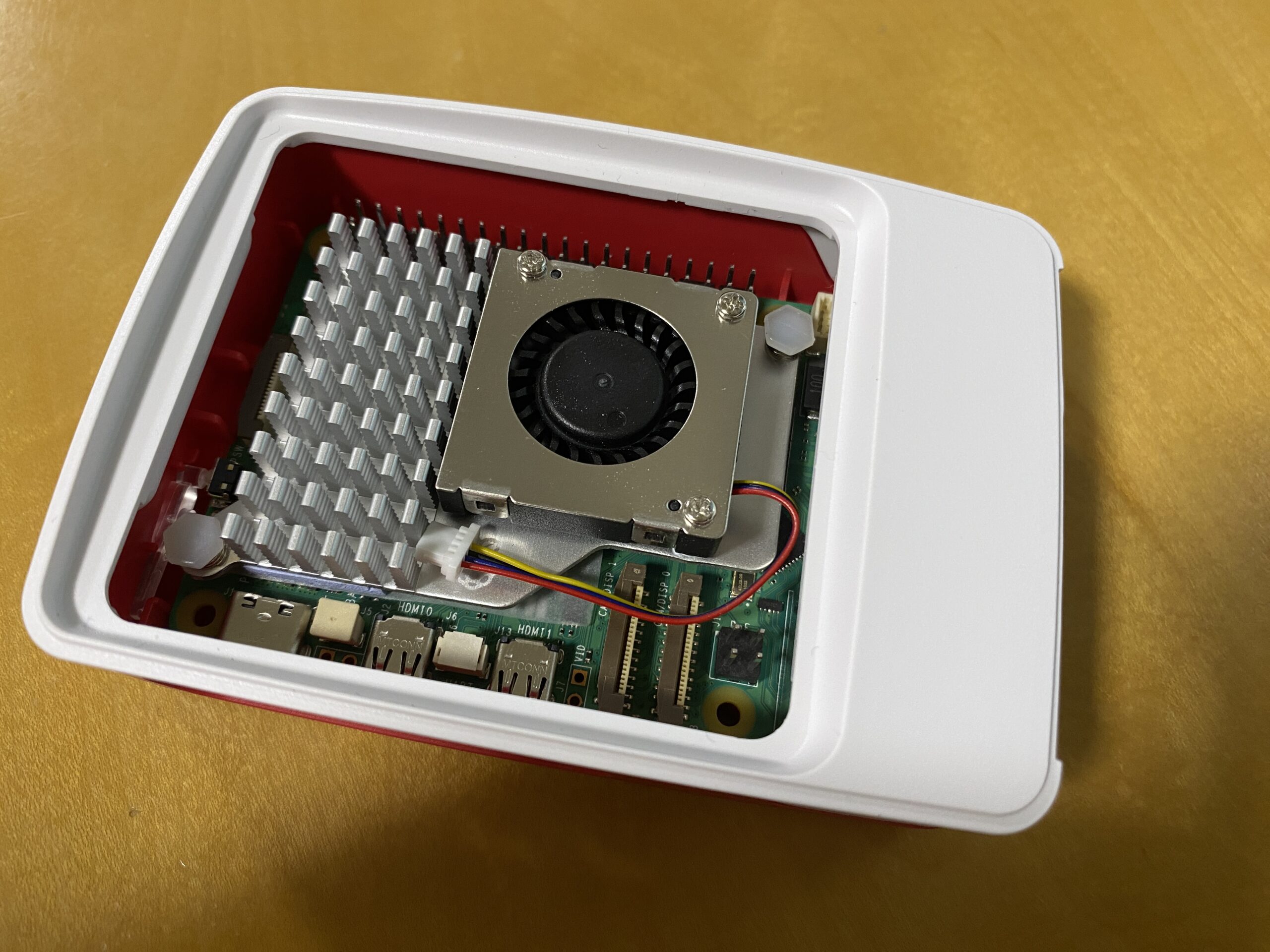
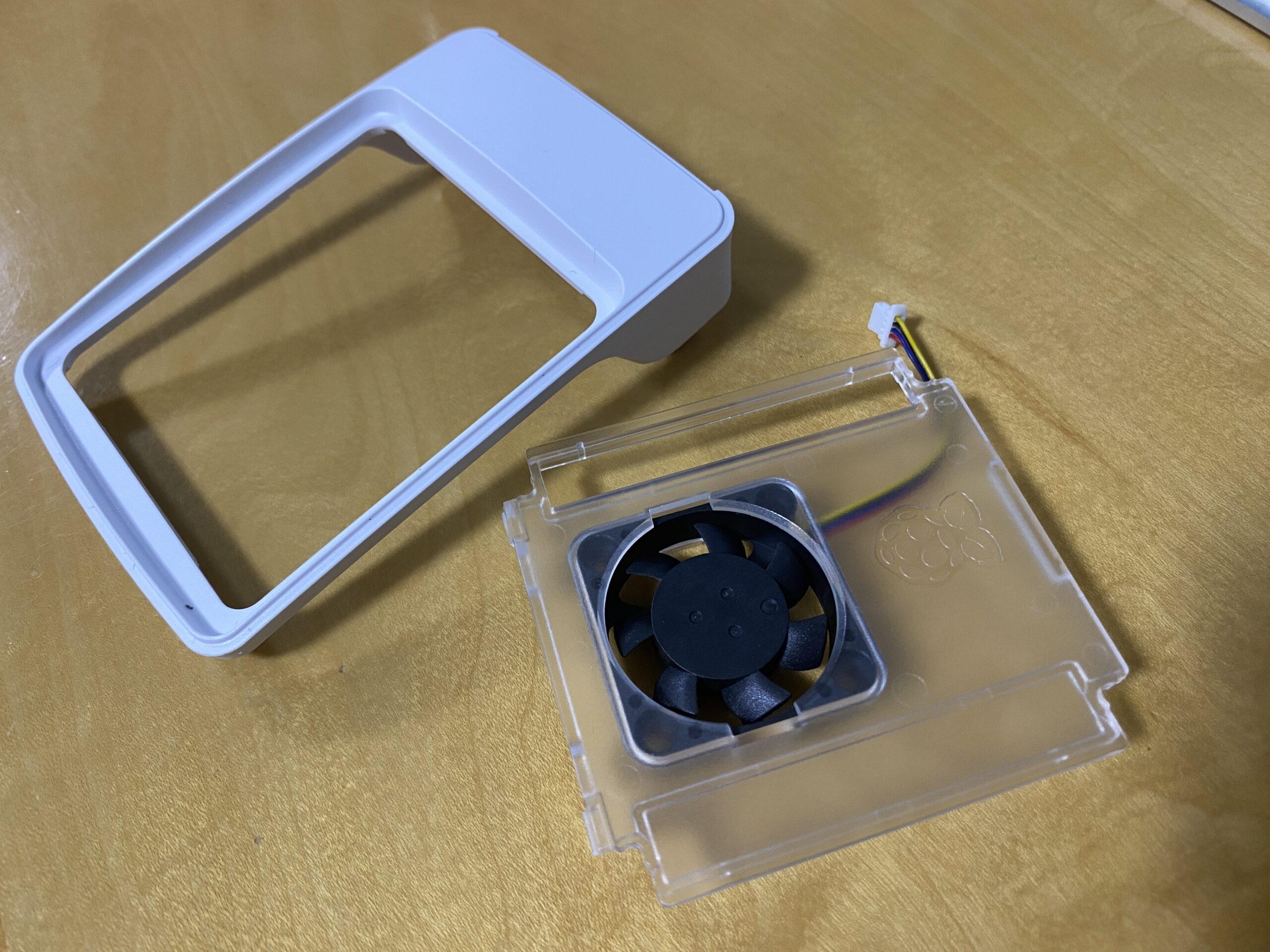
PimoroniのPiBowはすでにMaker Faire Tokyo 2023・OSC2023 Tokyo/Fall・Raspberry JAM 2023.10で展示済みですが(が、どれもレポートを書いていないですね……)、公式ケースを自分で触って組み立てたりするのは今回が始めてなので、ゆるりとレポートをしていきます。ちなみにこちらがPiBowの組み立てた様子。公式のActive Coolerを組み合わせる前提の作りで、今回もPimoroniらしい出来栄えですが、組み立て手順が少し複雑になり、下からレイヤー0〜2、Pi 5、レイヤー3、ActiveCooler、レイヤー4の順に重ねるようなりました。