私(あっきぃ)は、Raspberry Pi 5を使ってプレゼンテーション。操作は無線マウスのみで操作という、ちょっと冒険的な環境でした。
テーマは1GB RAMのRaspberry Pi 4 or 5を使うとどんな感じなのかについて、8GB RAMなどのモデルを擬似的に1GB RAMに制限して、ブラウザなどの起動や動作を確かめるレポートをしました。ちなみに、発表に使用したRaspberry Pi 5ももちろん1GBに制限していました(スライドデータはPDF)。
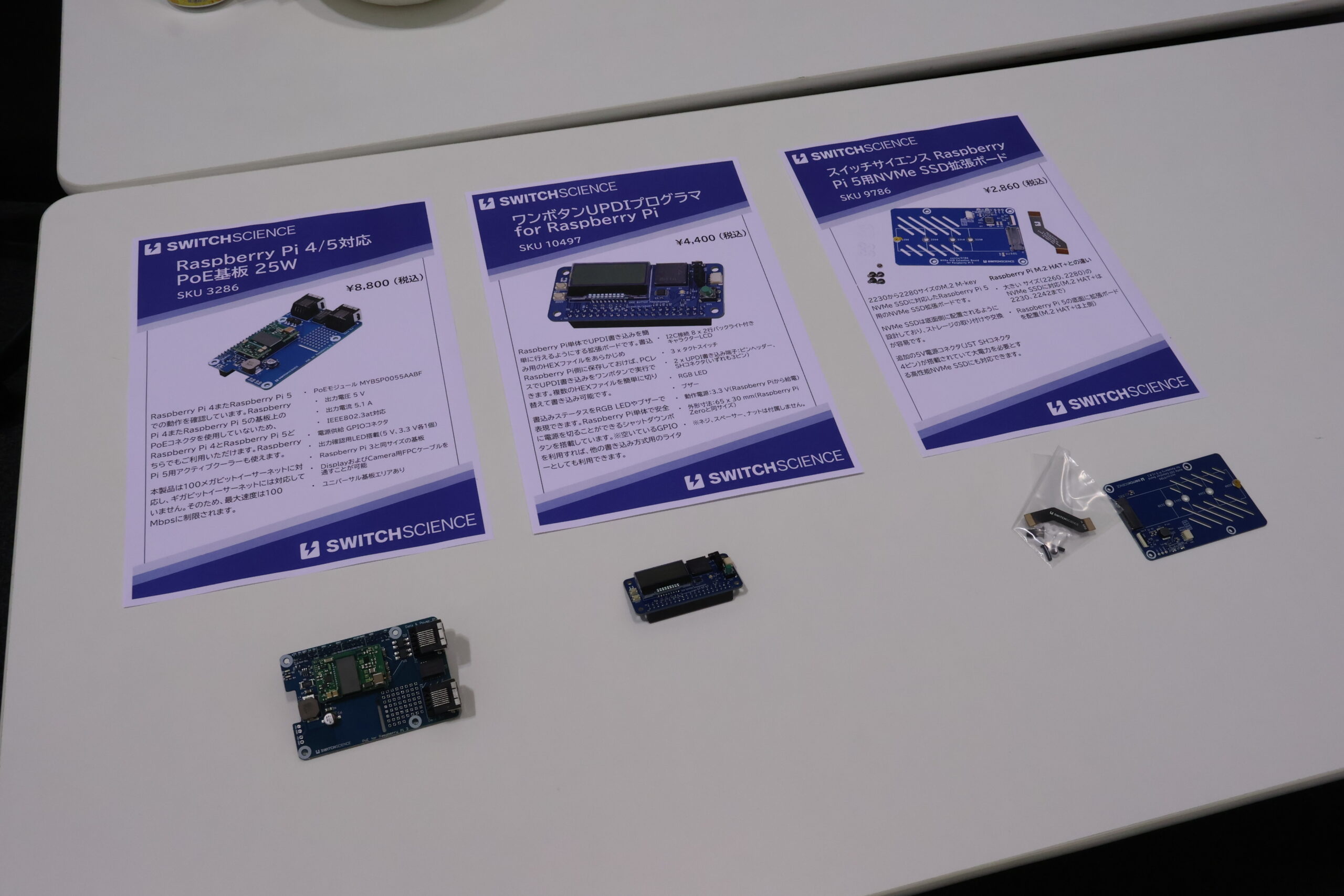
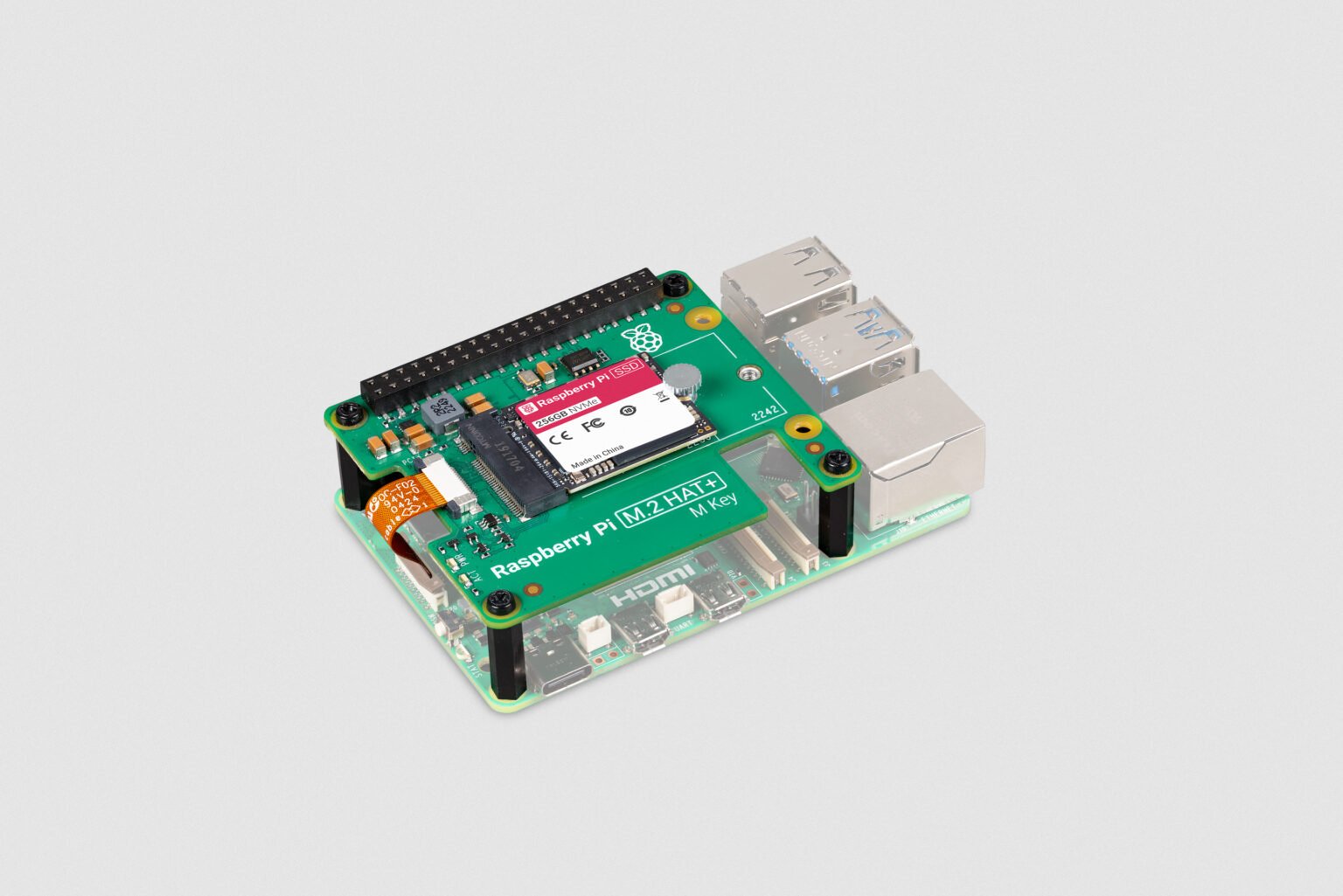
スイッチサイエンスさんの製品の展示。Raspberry Pi 4/5に対応したPoE基板や、M.2 と年拡張ボード、スイッチサイエンスさんのスタッフさんが欲しくて製作したというワンボタンUPDIプログラマボードを展示いただきました。
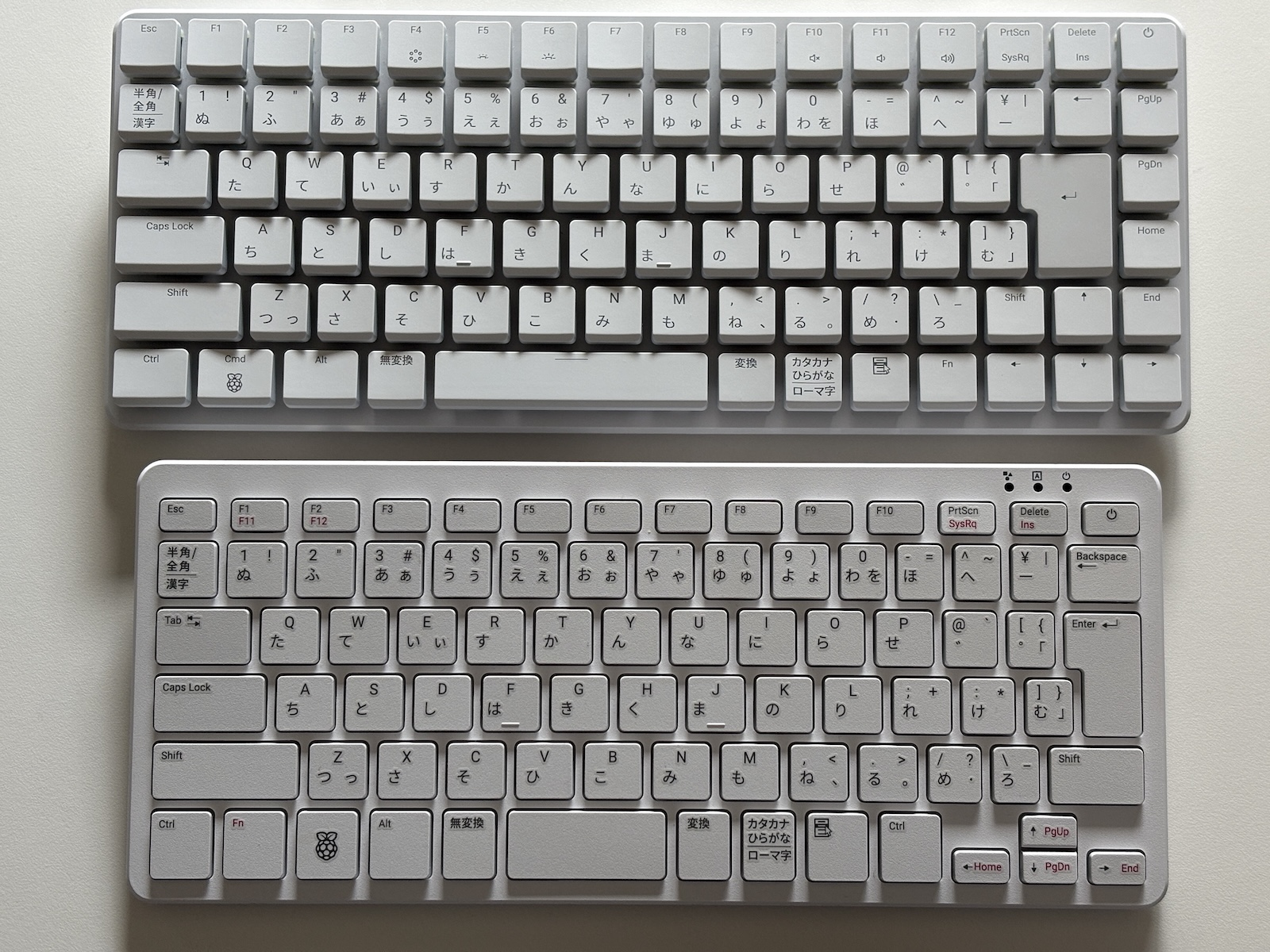
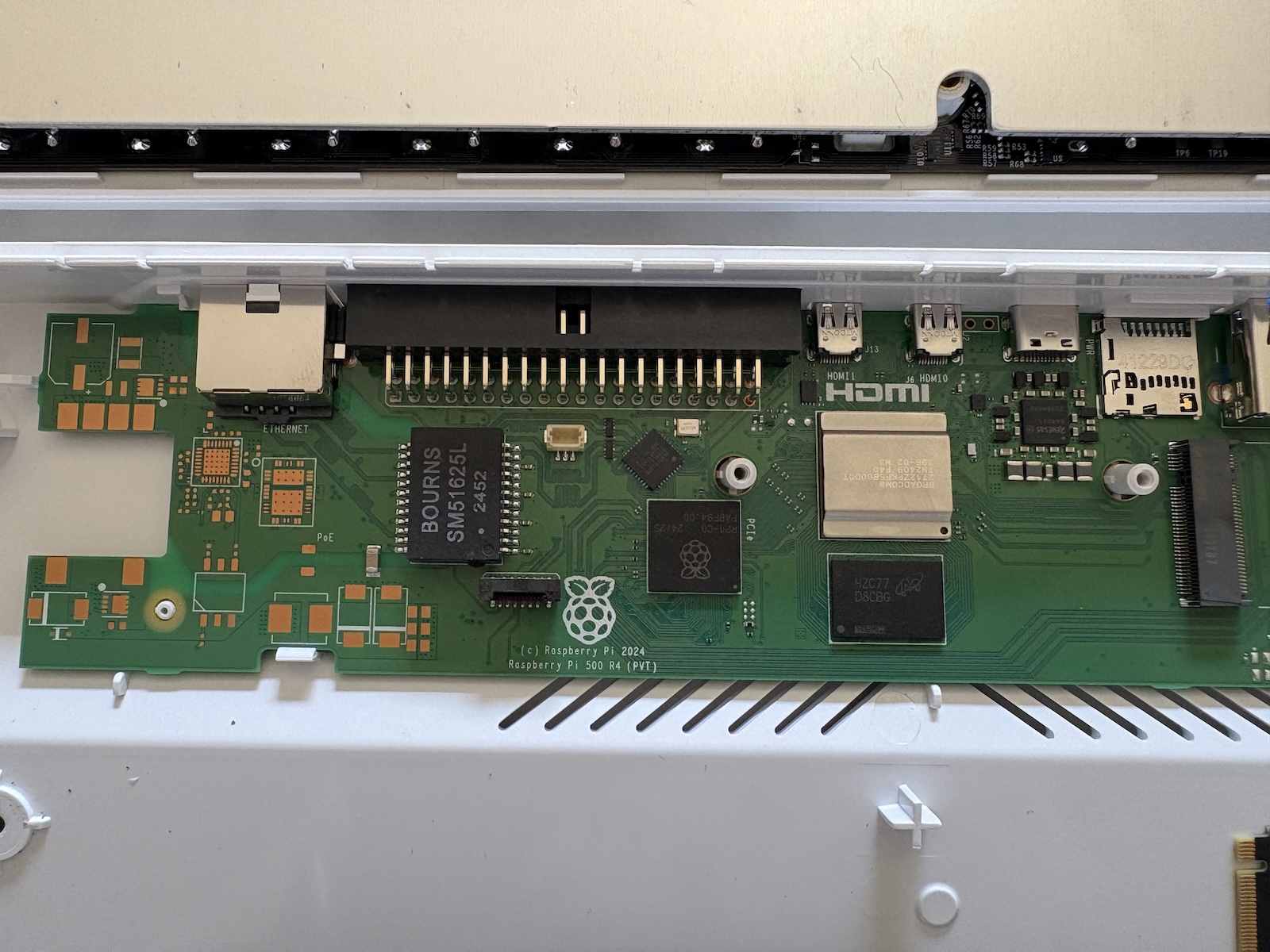
Raspberry Pi 500+は、先に発売されたRaspberry Pi 500のキーボード部分を、メカニカルキーボードに変更したモデルです。メカニカルキースイッチにはGateron KS-33ブルースイッチをRAL 7001シルバーグレーステムにカスタムしたクリッキーキースイッチが採用されています。メインのシステム基板はRaspberry Pi 500と共通で、ポートも同様の配置ながら、RAMは8GBから16GBに変更されています。また、256GB M.2 NVMe SSDが内蔵されている(交換可能)ため、快適な打ち心地のキーボードを備えた、強力なデスクトップマシンとして使うことができます。
別の記事では、Raspberry Pi Official Magazine 158号から抜粋された、Raspberry Pi 500の開発インタビューが掲載されています。
さて、今回はRaspberry Pi 500+の日本語配列版のサンプルをお預かりしていますので、写真でレビューをしていきます。ちなみに、先述のインタビュー記事で、写真左のChris Martin氏が手にしているのが日本語配列版のようでした(公式マガジンを定期購読しているため、PDF版を入手して拡大したらそのようでした)。
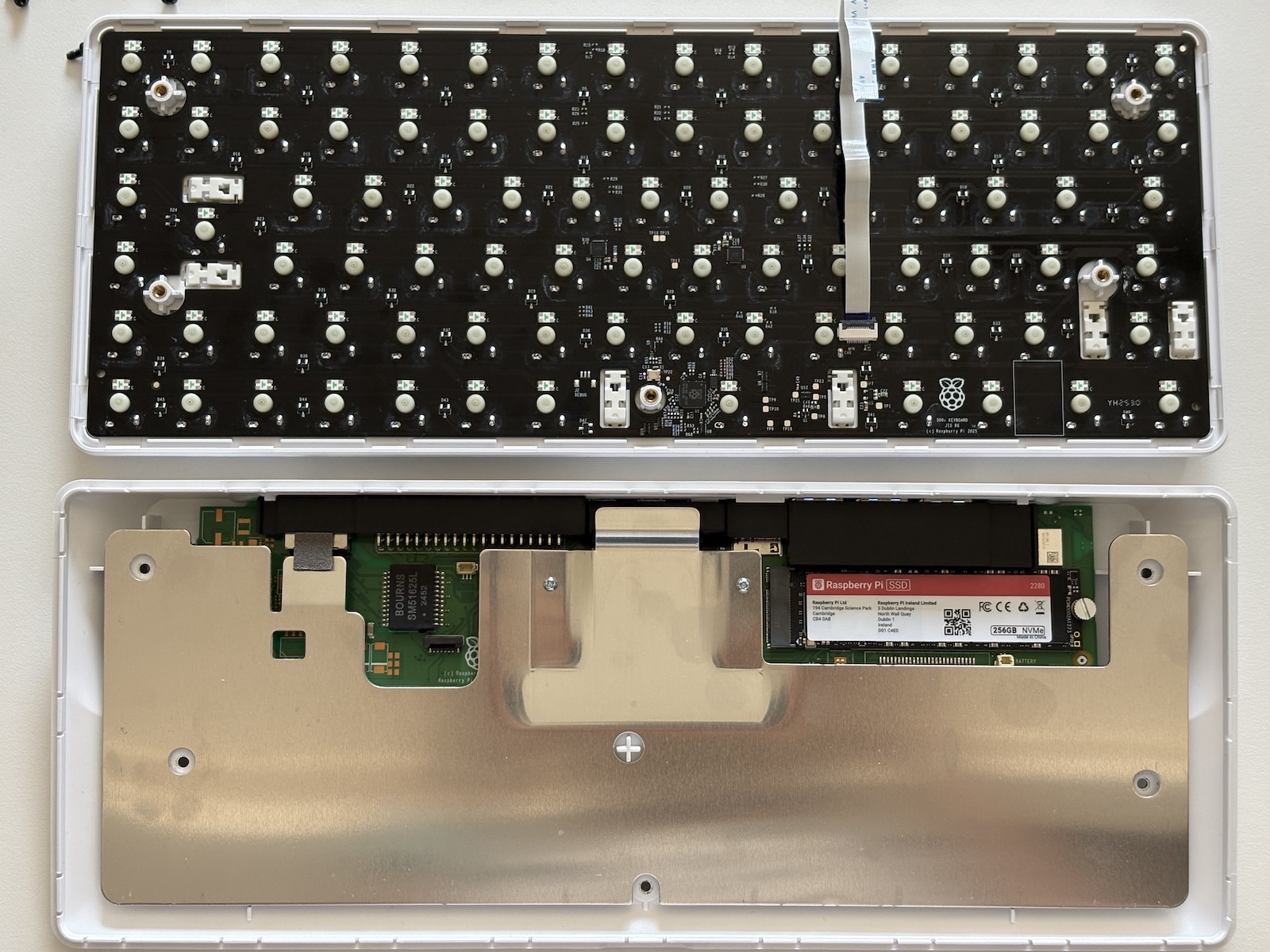
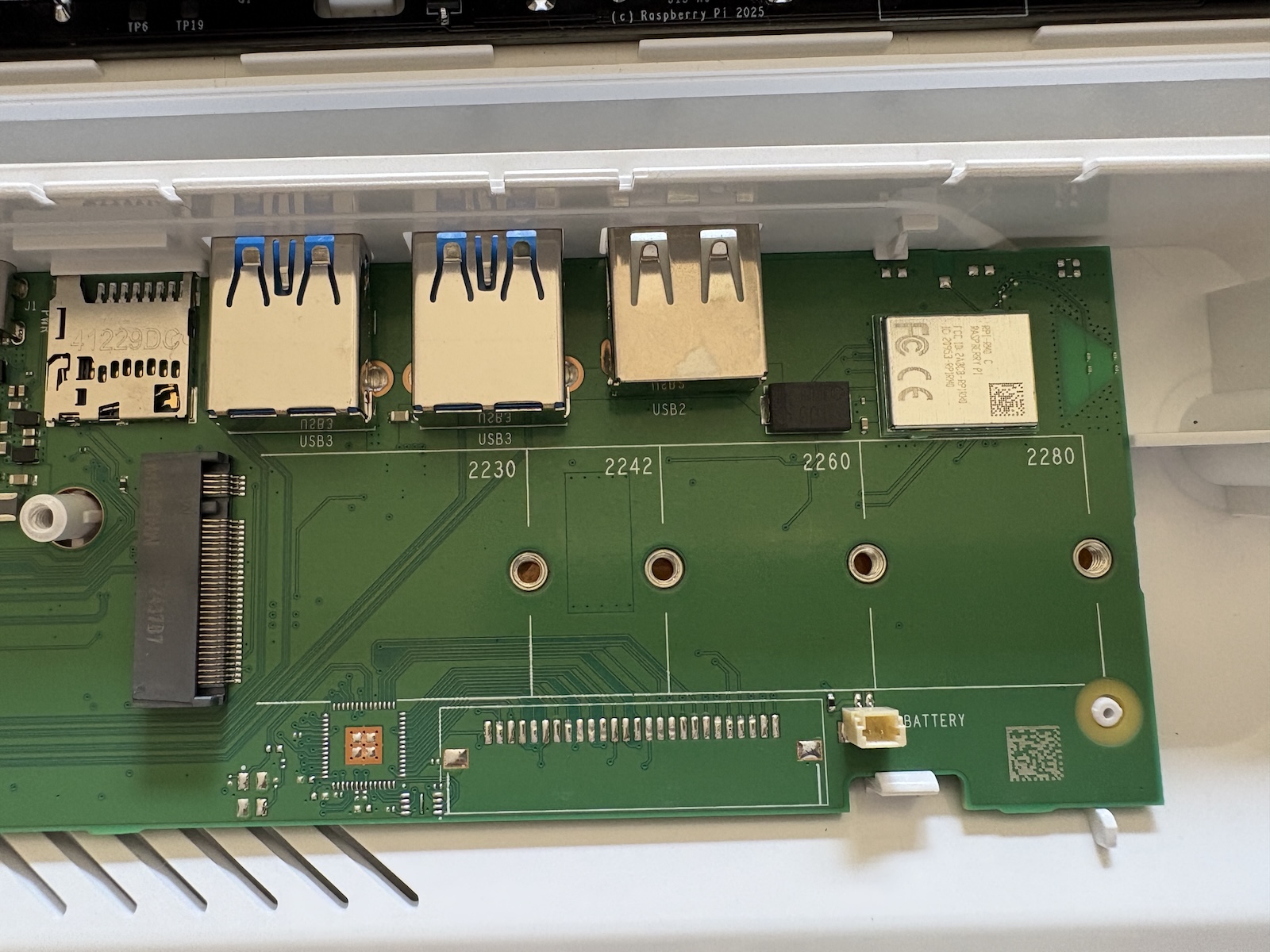
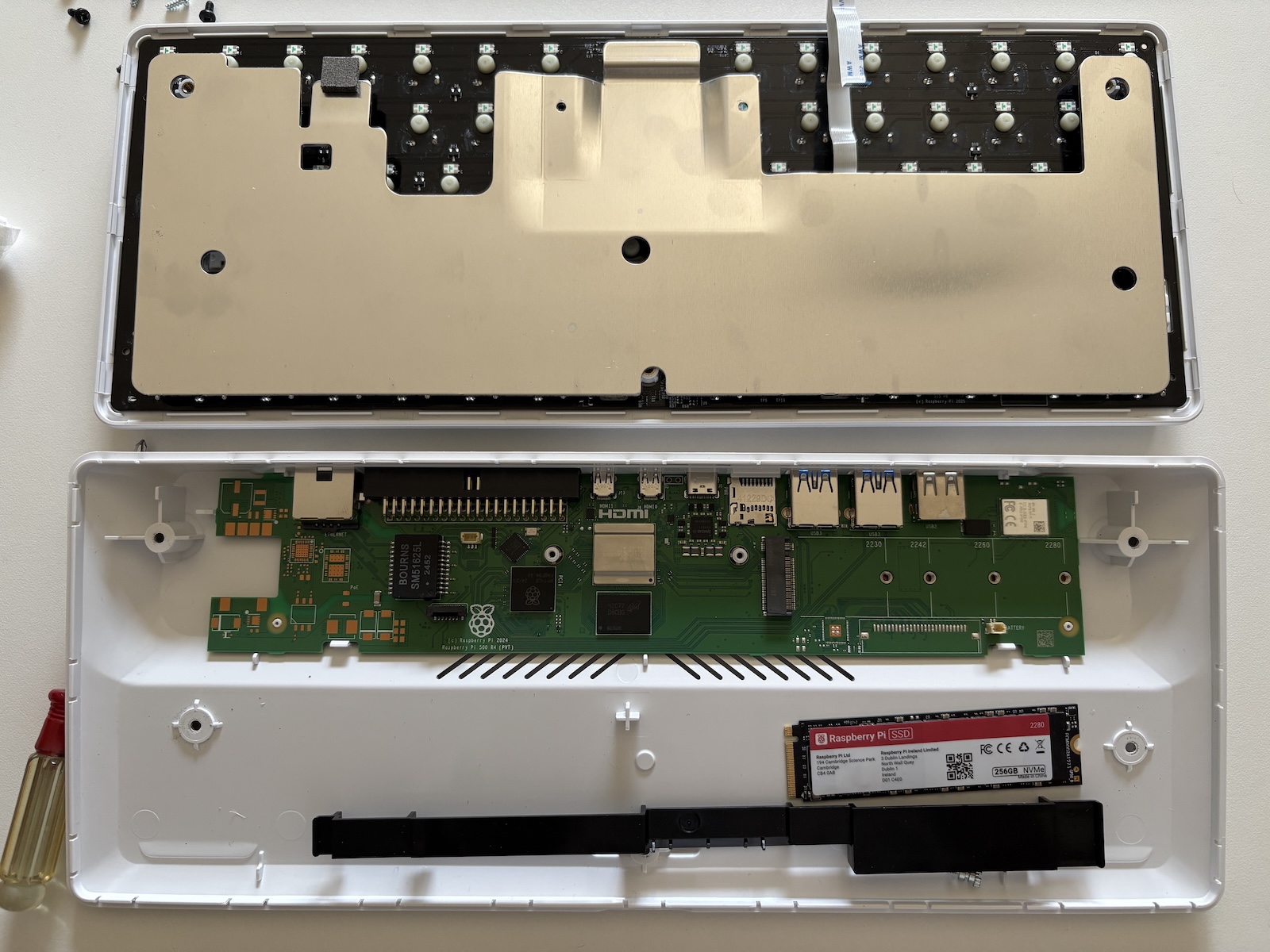
本体の方は、というと、ほとんどが銀色のプレートで覆われています。これがRaspberry Pi 500+のSoCの熱を逃がす放熱板として機能していて、中央上部の凹みの部分にSoCがくっついています。プレートが覆われていない部分に、今回の目玉の一つである、M.2 NVMe SSDスロットがあります。SSD交換だけであれば、プレートを外さずに交換ができましたが、手回しネジを手で回すにはプレートがいささか邪魔でしたので、マイナスドライバーを使うのが良さそうです。
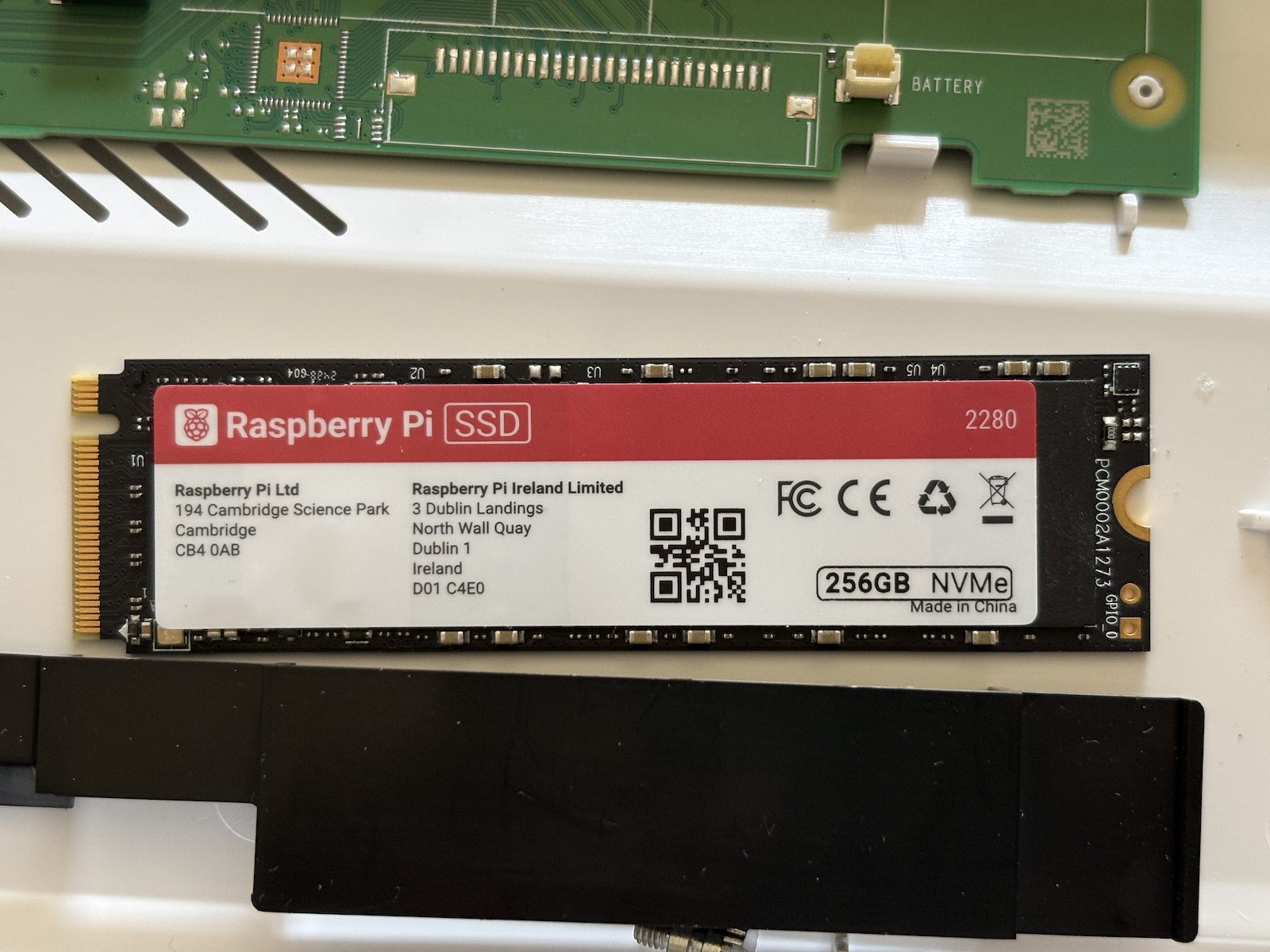
こちらはSSDの拡大。現在Raspberry Pi が公式に販売しているSSDは、256GB、512GB、1TBのいずれも2230サイズですので、Raspberry Pi 500+から出てきたこの2280サイズのSSDは”新種”ということになりそうです(が、別の人のレビューを見ると2230サイズらしく、サンプルだからでしょうかね……?)。もっと大容量なものを搭載したいときには、自分で交換ができます。
これはおそらく個人的な問題なのですが、普段Macの配列に慣れているせいか、あるいはEnterキーの右側にHome、End、PgUp、PgDnキーの縦一列があるせいか、その両方なのかは不明ですが、気がつくと指の置き場所がズレて、結構タイプミスをしてしまいがちでして、じつは慣れません……。BackSpaceと長音の打ち間違いは間違いなく全角半角キーがないMac配列への慣れの影響を感じていますが、他の段でもtypoしているのは個人的には理由がよくわかっていません。Raspberry Pi 500ではこのような感覚にはならなかったので、これは不思議に思っているところです。タッチタイピングをちゃんと習得していない我流配置かな入力をやっていて、当然ホームポジションも無視しているので、こうなっている可能性も高いとは思います。そういう意味では、実機を触って確かめてから購入に進むのが個人的にはおすすめです。
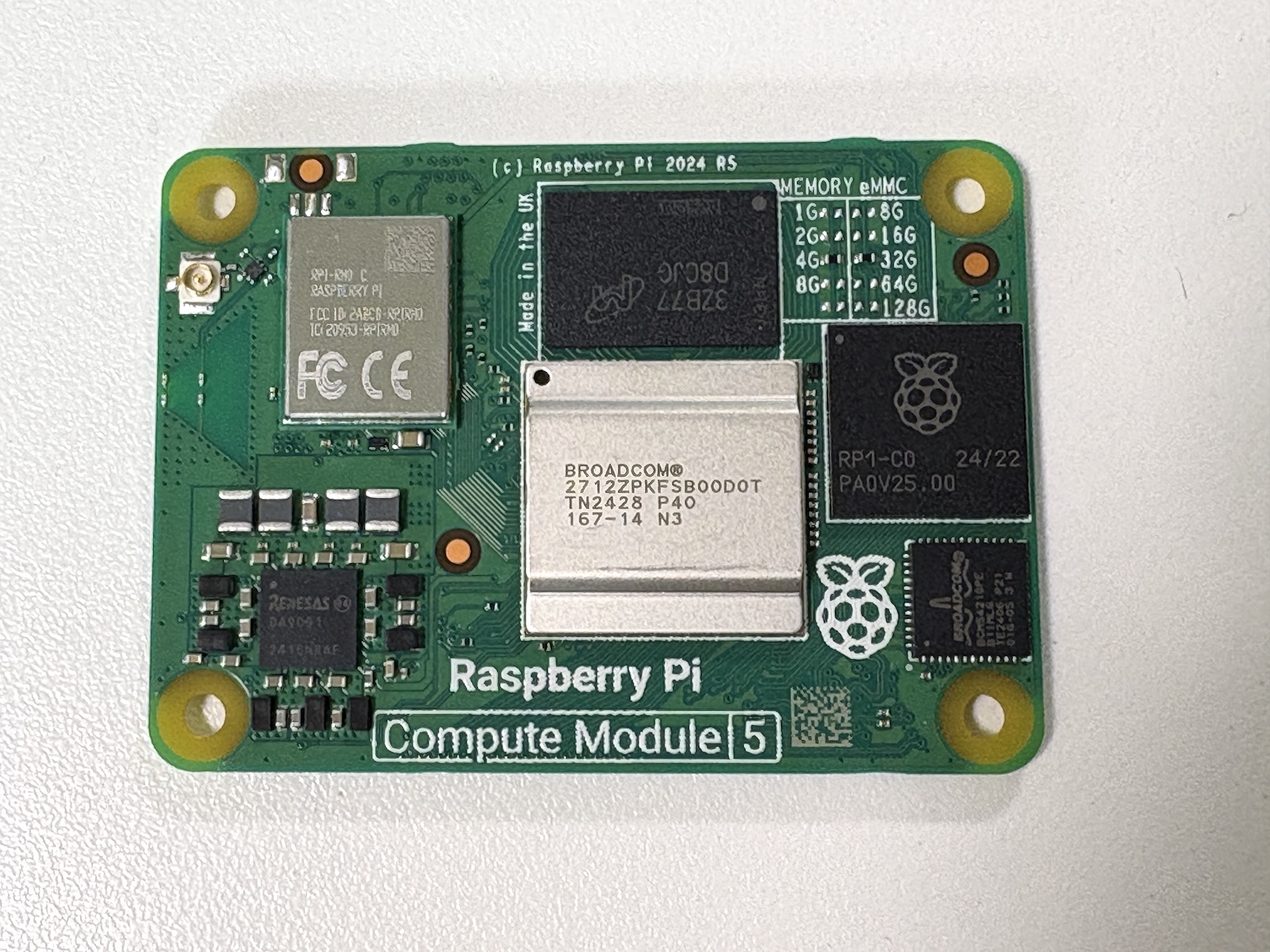
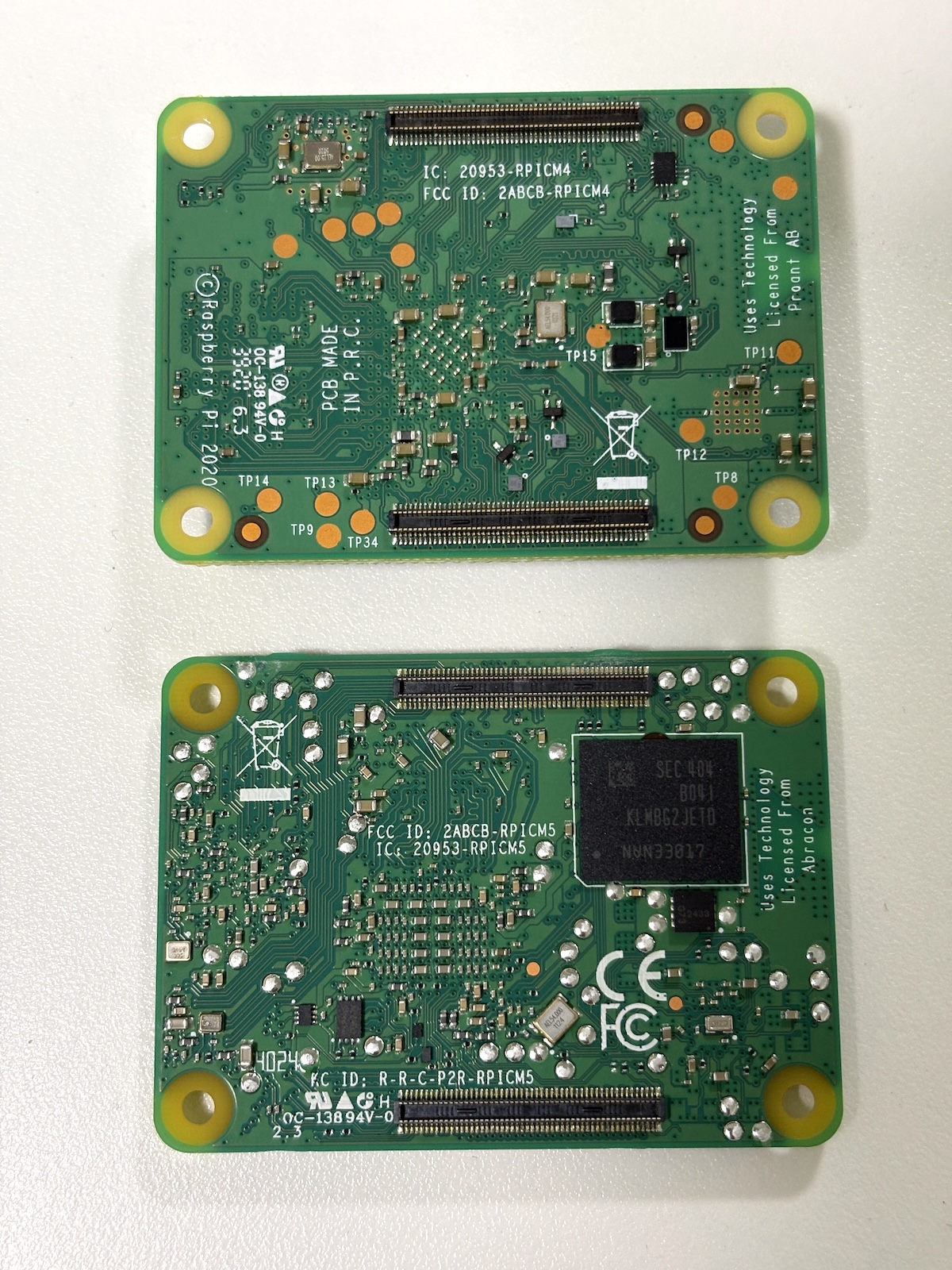
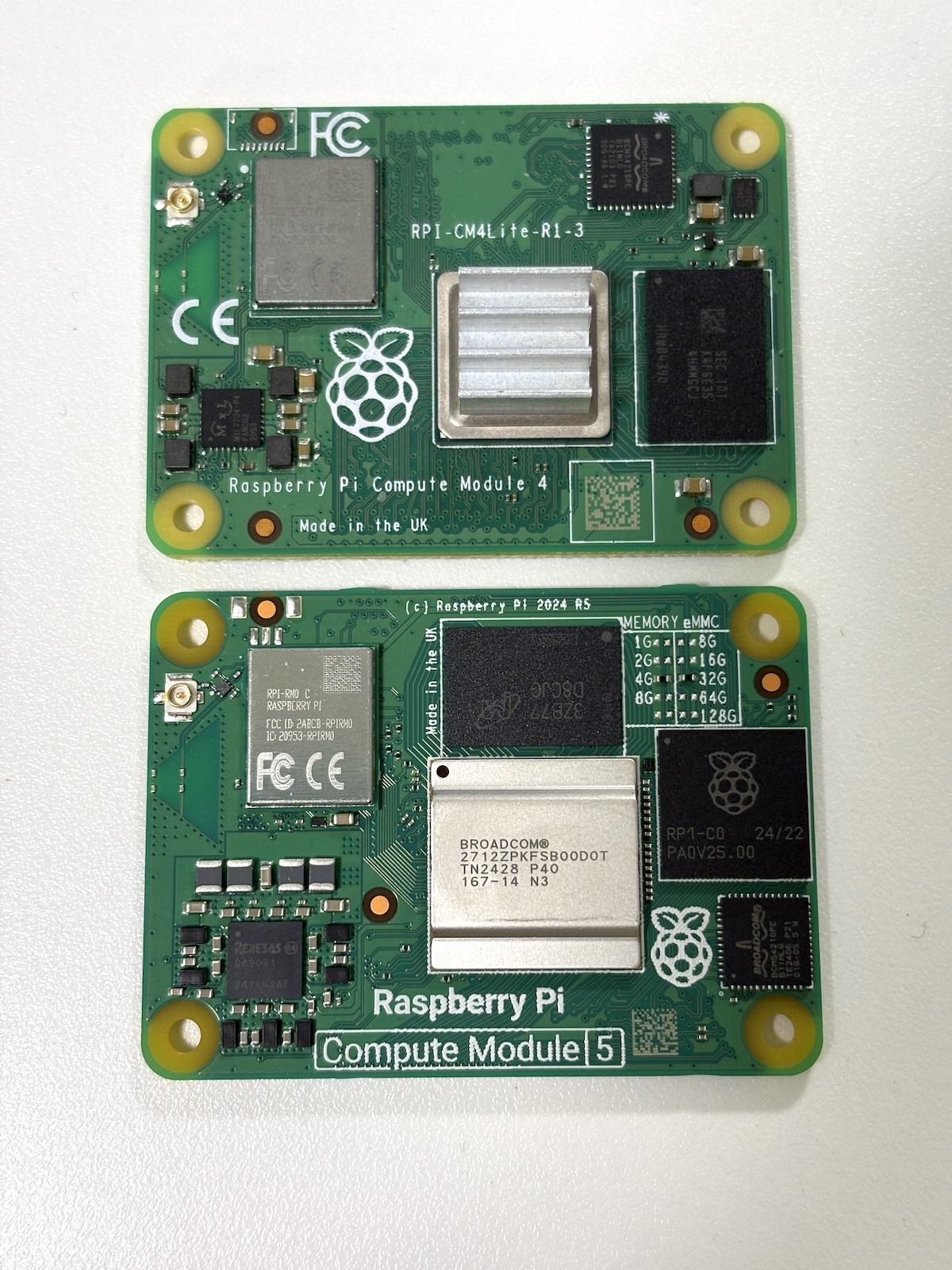
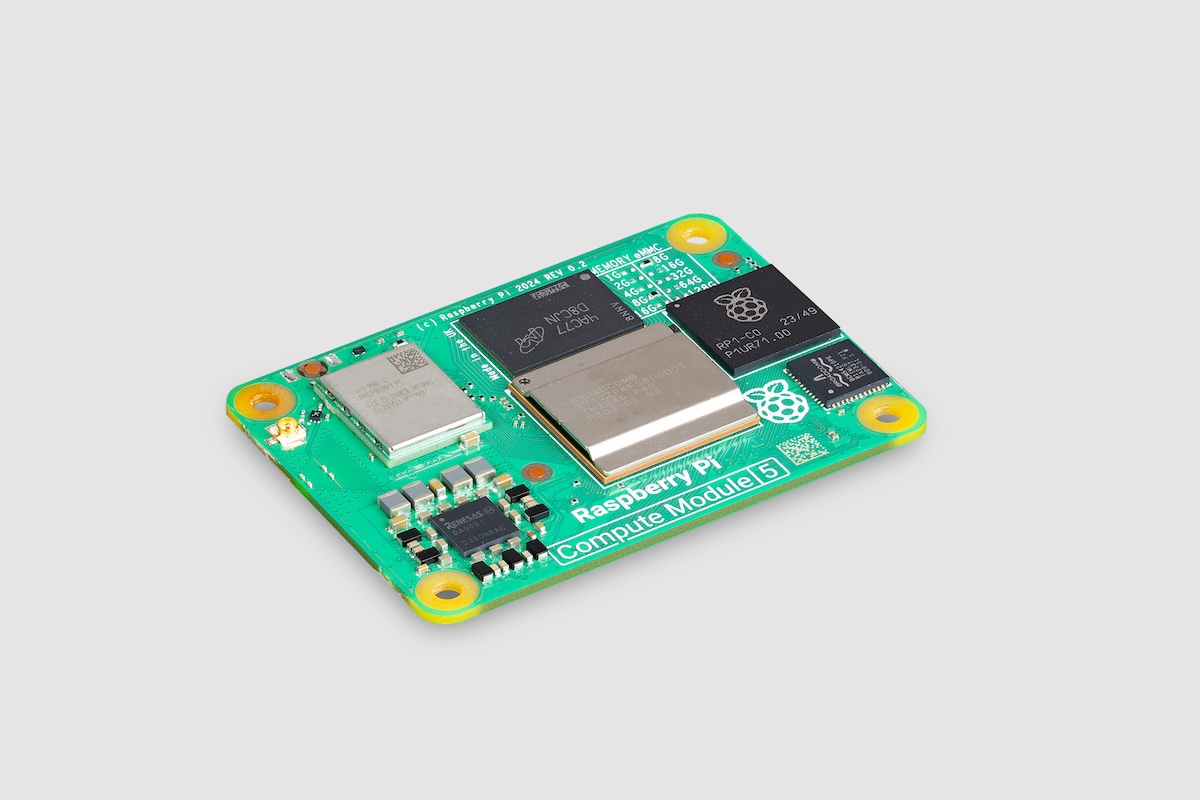
Raspberry Pi Compute Moduleは、おもに産業向けに開発された、モジュール用のRaspberry Piシリーズです。CM5は、CM4のフォームファクターを維持しながら、Raspberry Pi 5に搭載されたRP1を搭載しており、CM4にはなかったUSB3.0x2ポートを新たにサポートします。CM4とは多くの後方互換性がありますが、USB3.0ポートを搭載する代わりに2-lane MIPIインターフェイスが削除されるなど、いくつかの変更もあります。
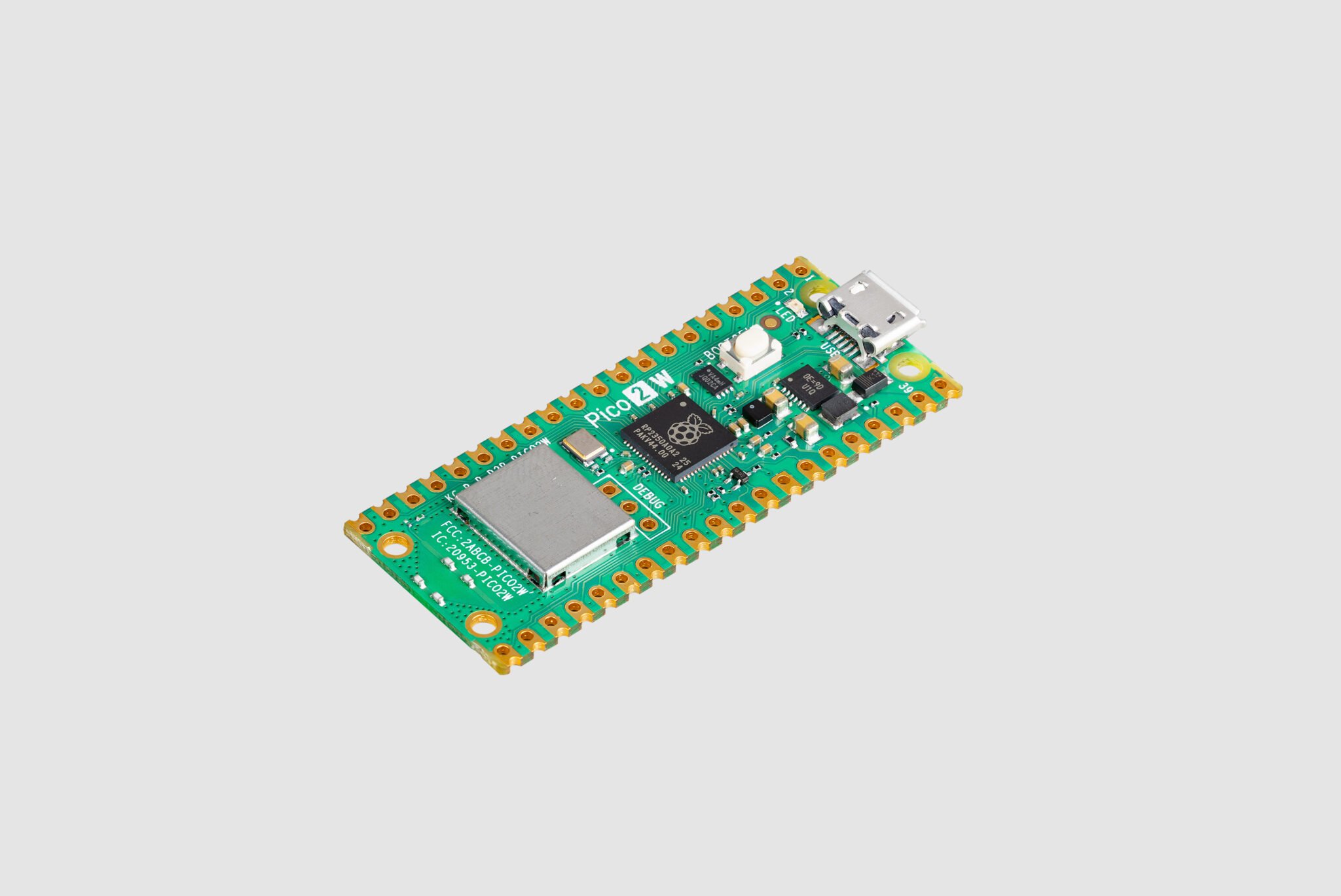
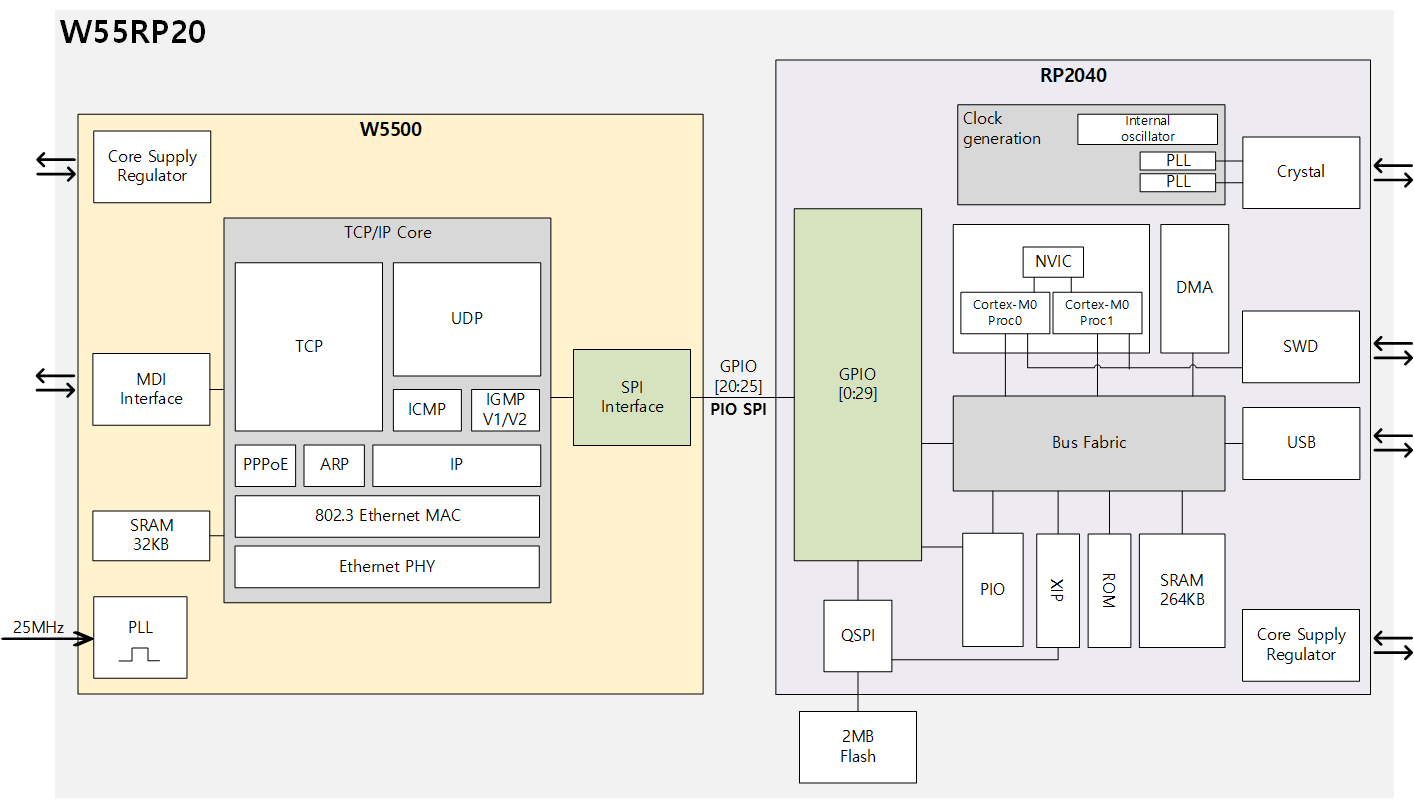
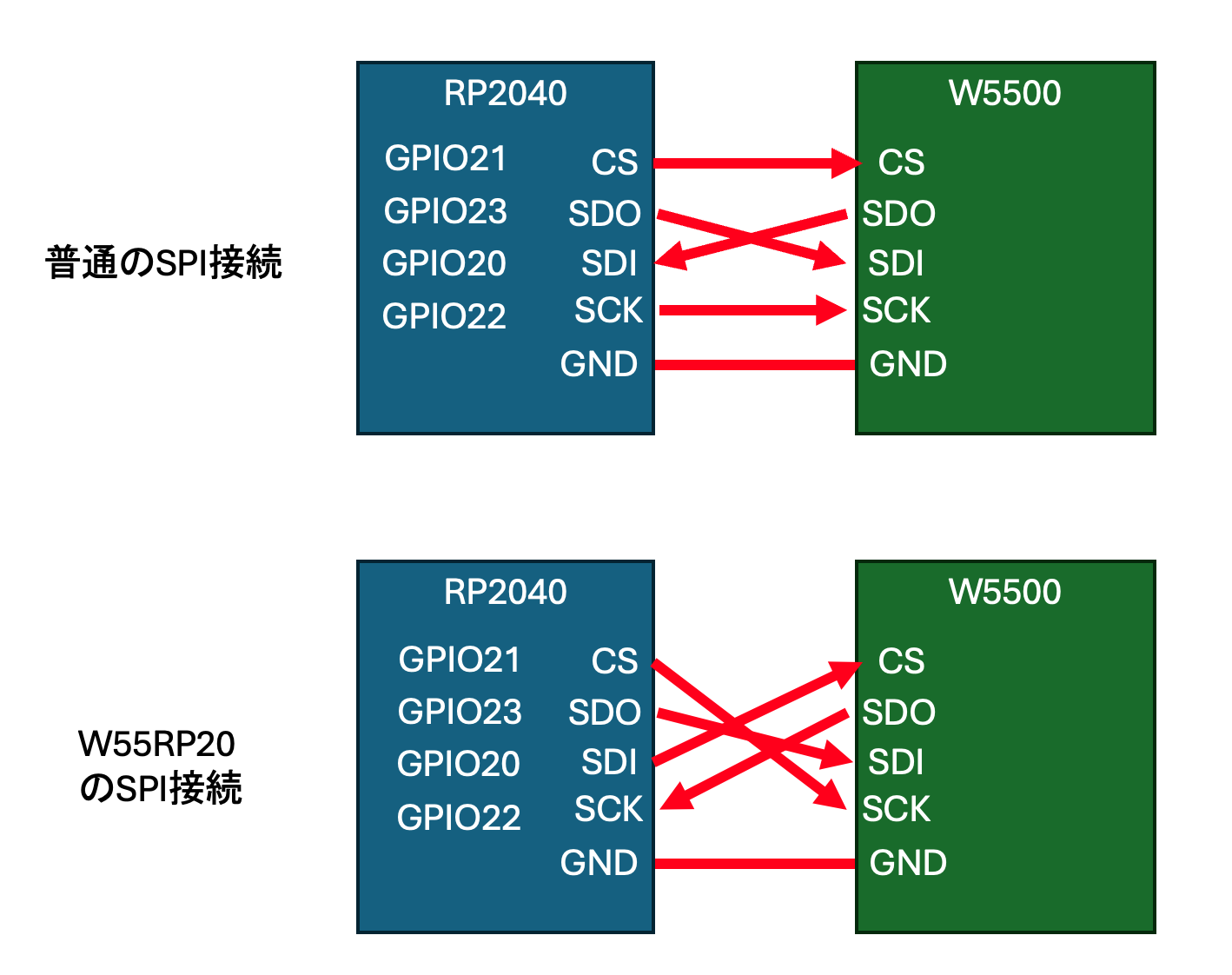
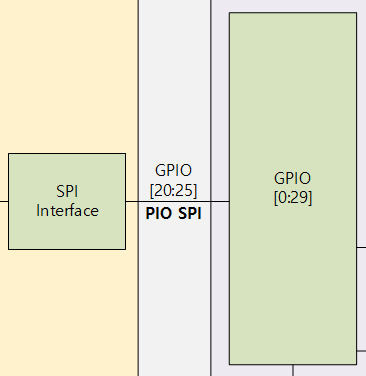
W55RP20はこのネットワークチップW5500と、Raspebrry Pi Picoに載っているRP2040とFlashを1パッケージにまとめた製品です。 1パッケージにまとめるメリットとしては、中身のW5500とRP2040とFlashを別々に基板に乗せる場合に比べてチップ1枚分の面積が減らせて基板を小型化できたり、配線をシンプルにできるなどがあります。私は趣味でRP2040の基板設計制作もしているので、個人的にも1パッケージになって面積や配線のコストが減るのは大変嬉しいです。