Raspberry Pi AI Kitは、Hailo 社と共同開発したAIアクセラレータ モジュールに、先日販売開始したRaspberry Pi M.2 HAT+をセットにしたキットです。モジュールにはHailo-8L コプロセッサを搭載しており、Raspberry Pi 5と組み合わせることで、ニューラル ネットワーク、人工知能、機械学習を低遅延かつ低消費電力で試すことが可能としています。
日本ではRaspberry Pi 5の発売はまだですが、先週末には日本の技適に関する証書PDFがRaspberry Piのポータルにアップロードされ、進捗が見えてきています。残念ながらこのPDFをもって日本で買ったり使ったりして良いことにはなっておらず、製品(またはパッケージ等)にマークと番号が印字されたものが販売開始されて初めて適法に利用できるようになるため、もう少しの辛抱です。
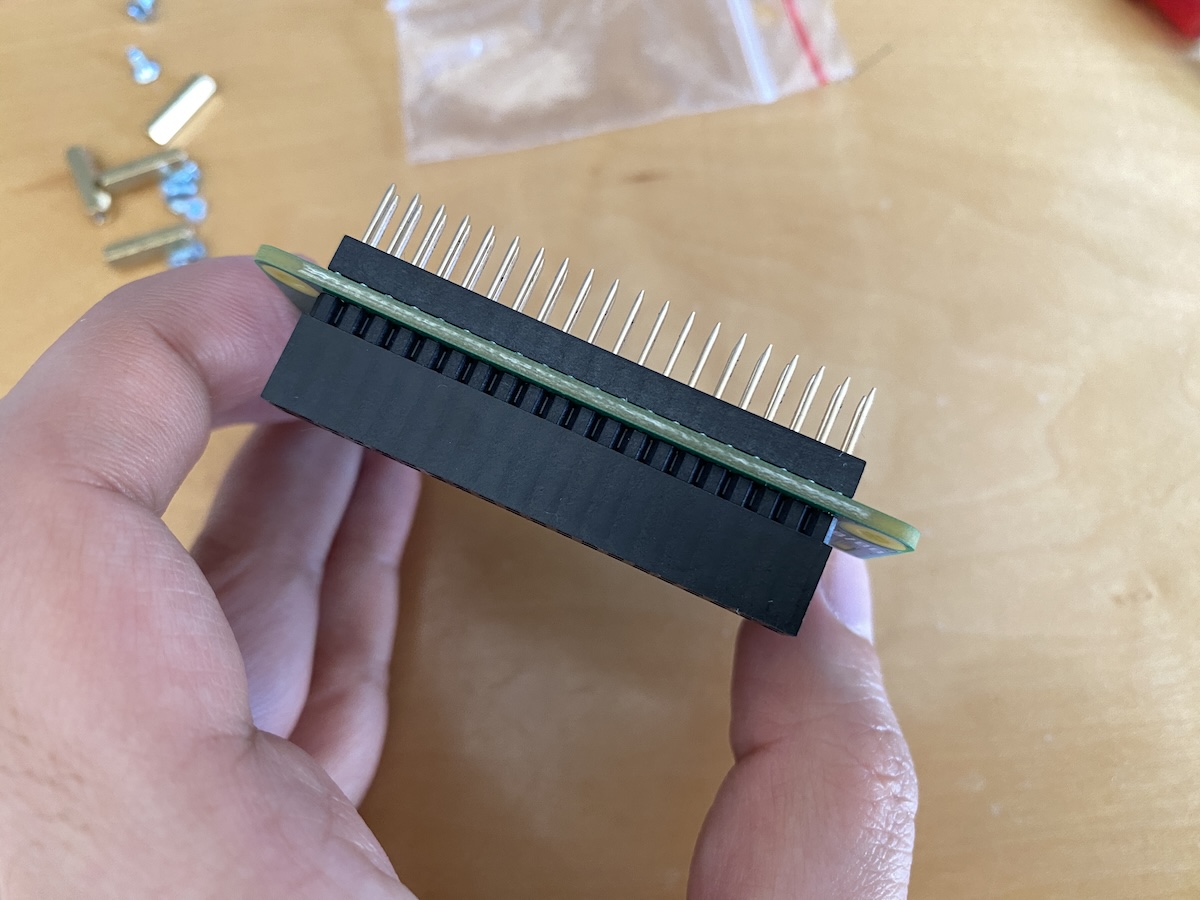
今回遊ぶ内容的にはどれを使用しても同じですが、今回はEthernet HATの方を使用しました。こちらの場合別途Raspberry Pi Picoが必要になりますが、EVB-Picoよりも全長が少し短くなってコンパクトになります。また、EVB-Picoと比べるとボード上の通電LEDがPicoで覆い隠せるため、実運用に投入するとLEDが眩しくて邪魔という問題が緩和できます。まあ、EVB-PicoのEVBはEValuation Boardの略だと思うので、実運用に適しているのかは不明ですが……。
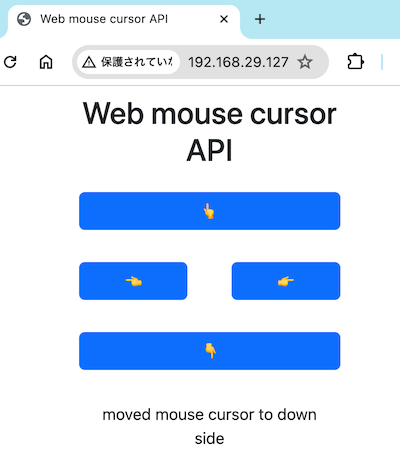
import time
import usb_hid
from adafruit_hid.mouse import Mouse
mouse = 0
while not mouse:
try:
mouse = Mouse(usb_hid.devices)
except:
pass
time.sleep(1)
for i in range(0, 8):
mouse.move(x=20, y=20)
time.sleep(0.25)
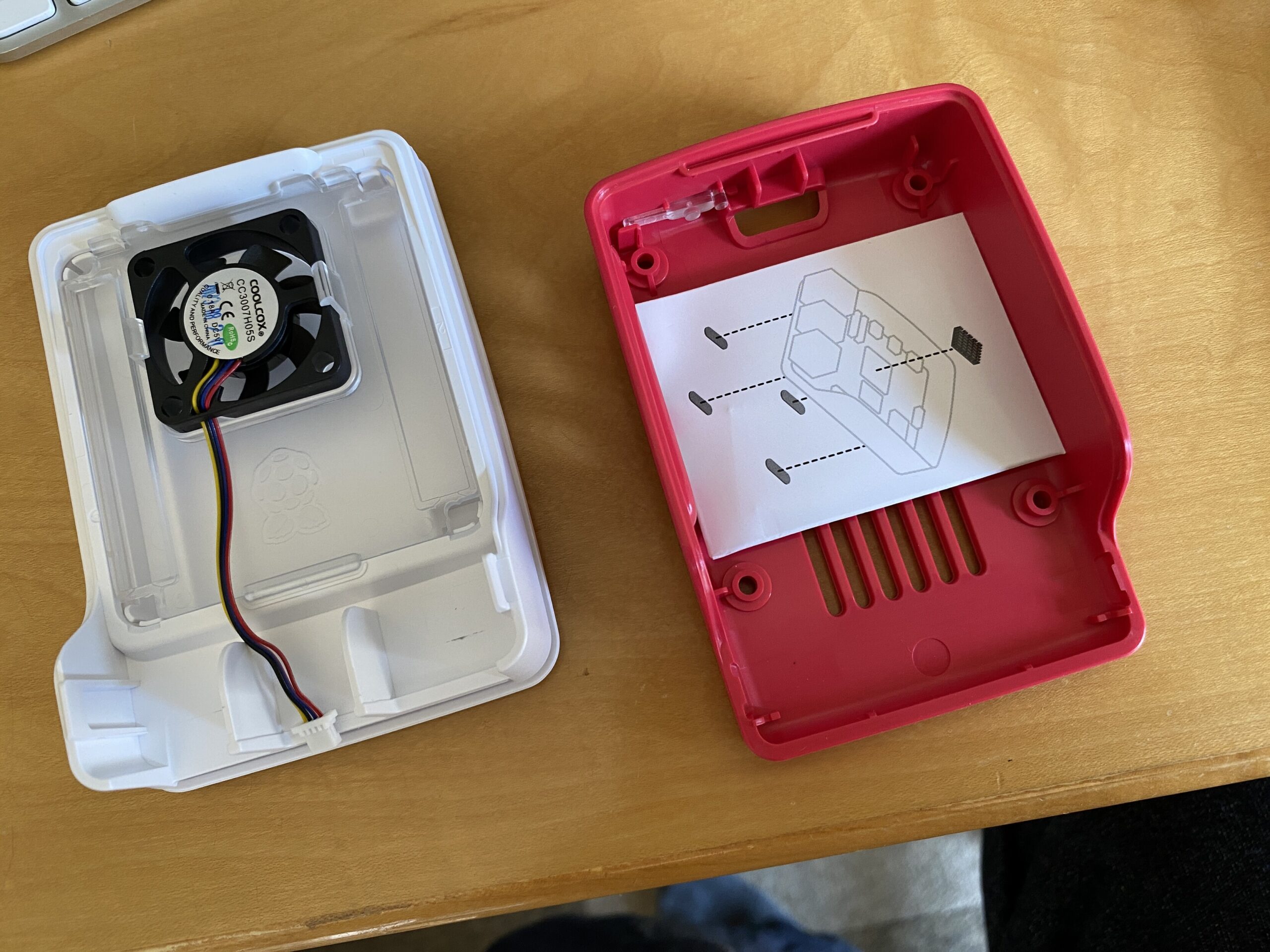
Pimoroniで予約していたケース””だけ””が届きました。PiBowと公式ケースで、いずれもサンプルではなく、いずれRaspberry Pi 5の技適が通った時のために個人用に購入したものです。……私はPi 5を2台買うんだろうか🤔ちなみに、写真のPi 5はサンプルですが。今回は話題的に通電しない済むので技適等は無関係ですね。
PimoroniのPiBowはすでにMaker Faire Tokyo 2023・OSC2023 Tokyo/Fall・Raspberry JAM 2023.10で展示済みですが(が、どれもレポートを書いていないですね……)、公式ケースを自分で触って組み立てたりするのは今回が始めてなので、ゆるりとレポートをしていきます。ちなみにこちらがPiBowの組み立てた様子。公式のActive Coolerを組み合わせる前提の作りで、今回もPimoroniらしい出来栄えですが、組み立て手順が少し複雑になり、下からレイヤー0〜2、Pi 5、レイヤー3、ActiveCooler、レイヤー4の順に重ねるようなりました。
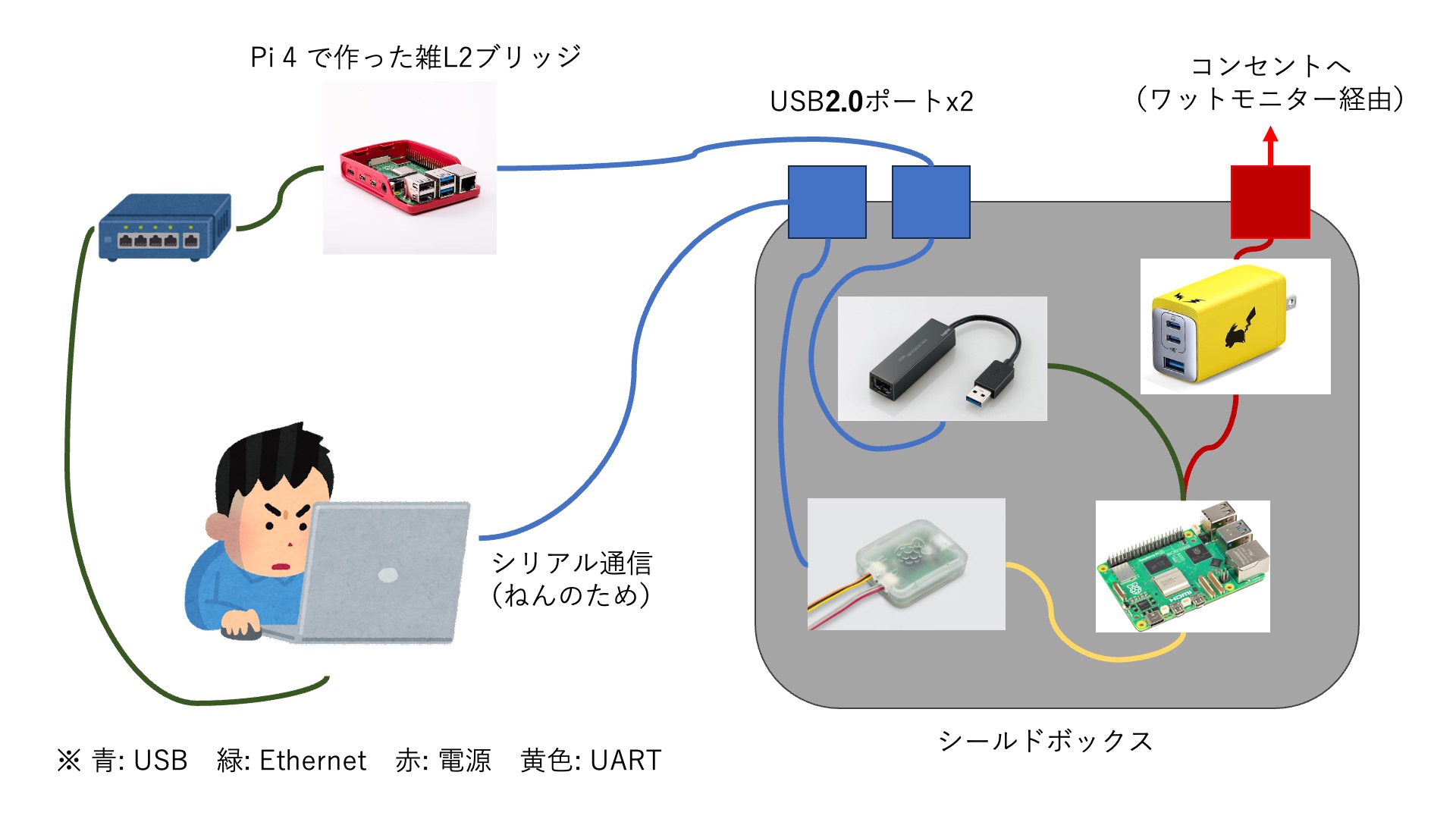
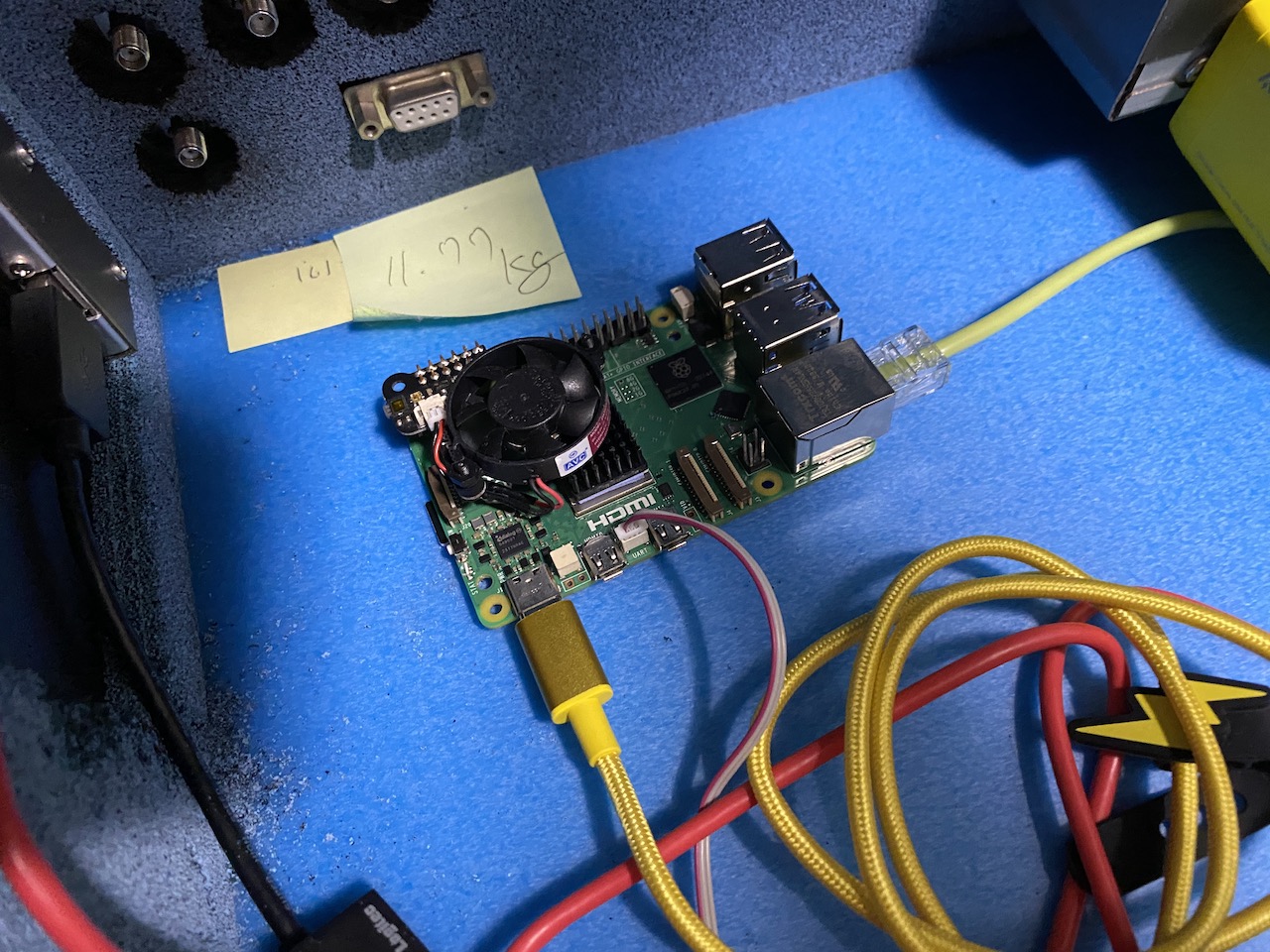
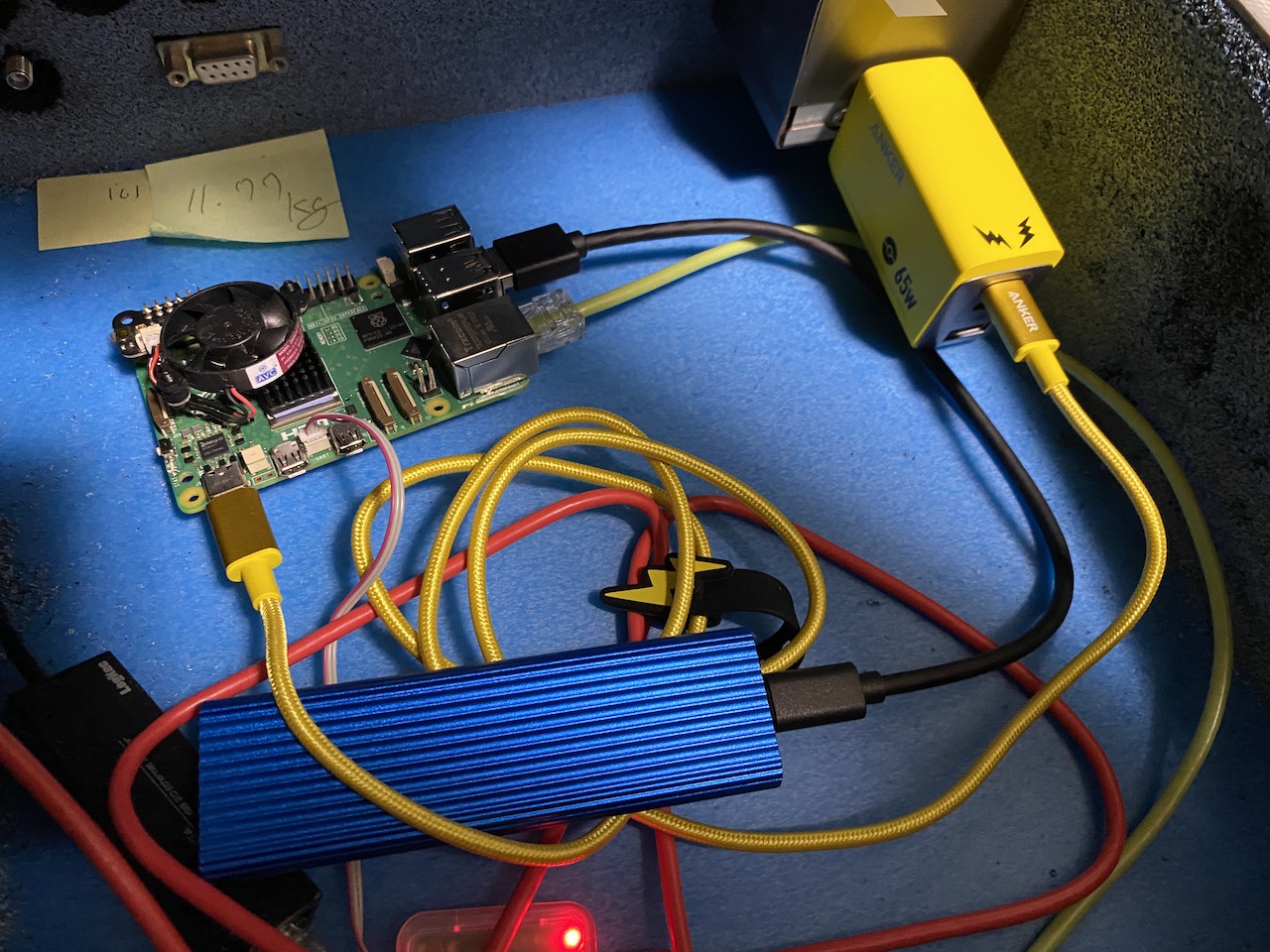
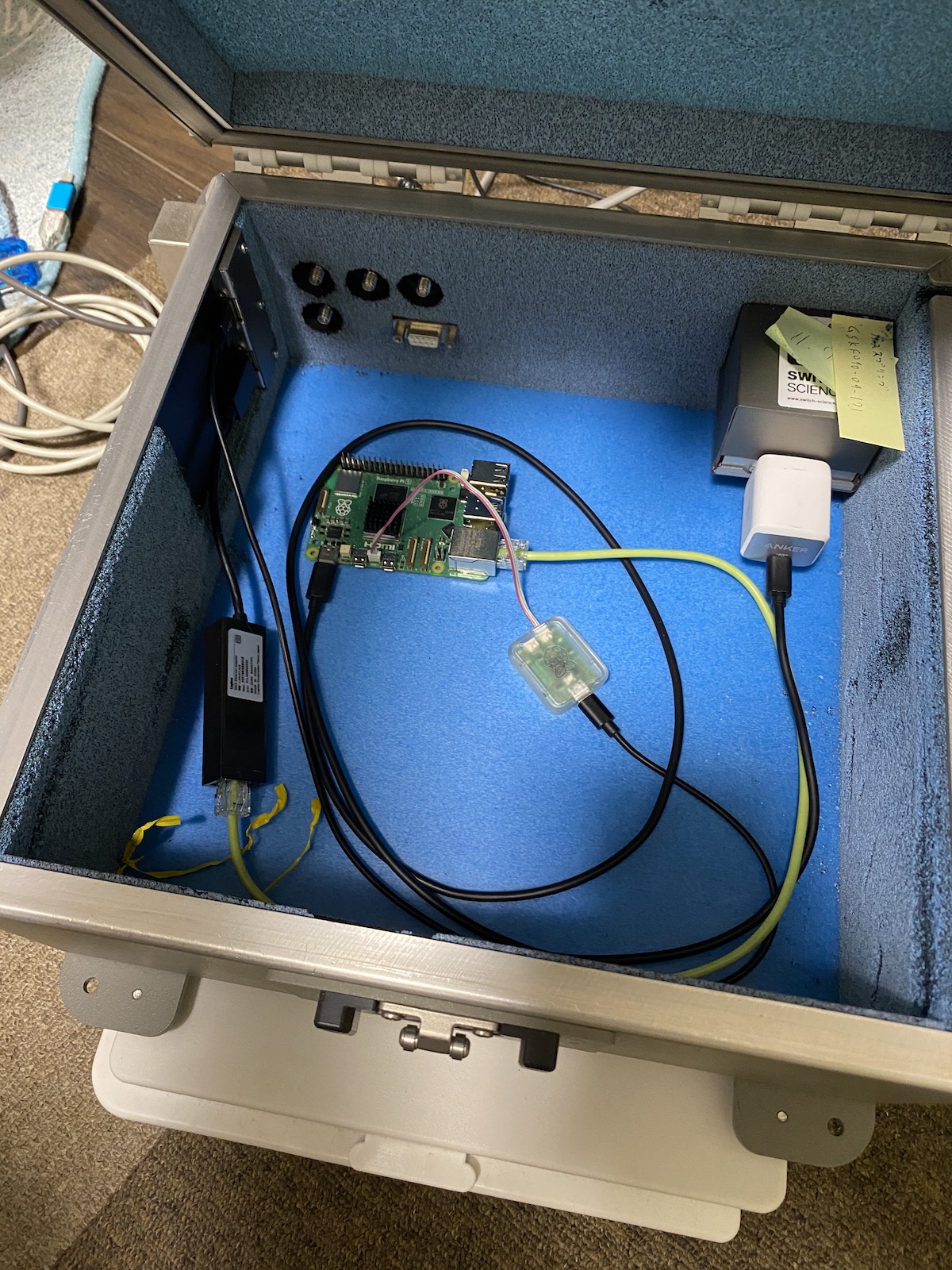
ネットワークは、ボックス内でUSB3.0-LAN変換アダプターを使用して接続し、ボックス外に出るためのUSB端子に接続します。ただし、ボックスのUSB端子はUSB2.0のため、性能は480Mbps内に制限されます。ボックス外で、Raspberry Pi 4で作ったネットワークブリッジにUSB接続し、LANに接続可能としています。iperf3での実測は200Mbps程度でしたが、ログインしたりテストに必要なパッケージを取得する程度ならなど十分でしょう。もしGbEのテストをするときは、ボックス内にPi4などを追加で投入してテストすれば対応可能です。
ボックスのもう一つのUSB端子には、Rspberry Pi Debug Probeを接続しています。これを用いることで、OS起動前の情報が取得できますし、OS起動後もシリアル通信でログインして操作することが可能です。
まずは小さいヒートシンクだけでSDカード起動してみる
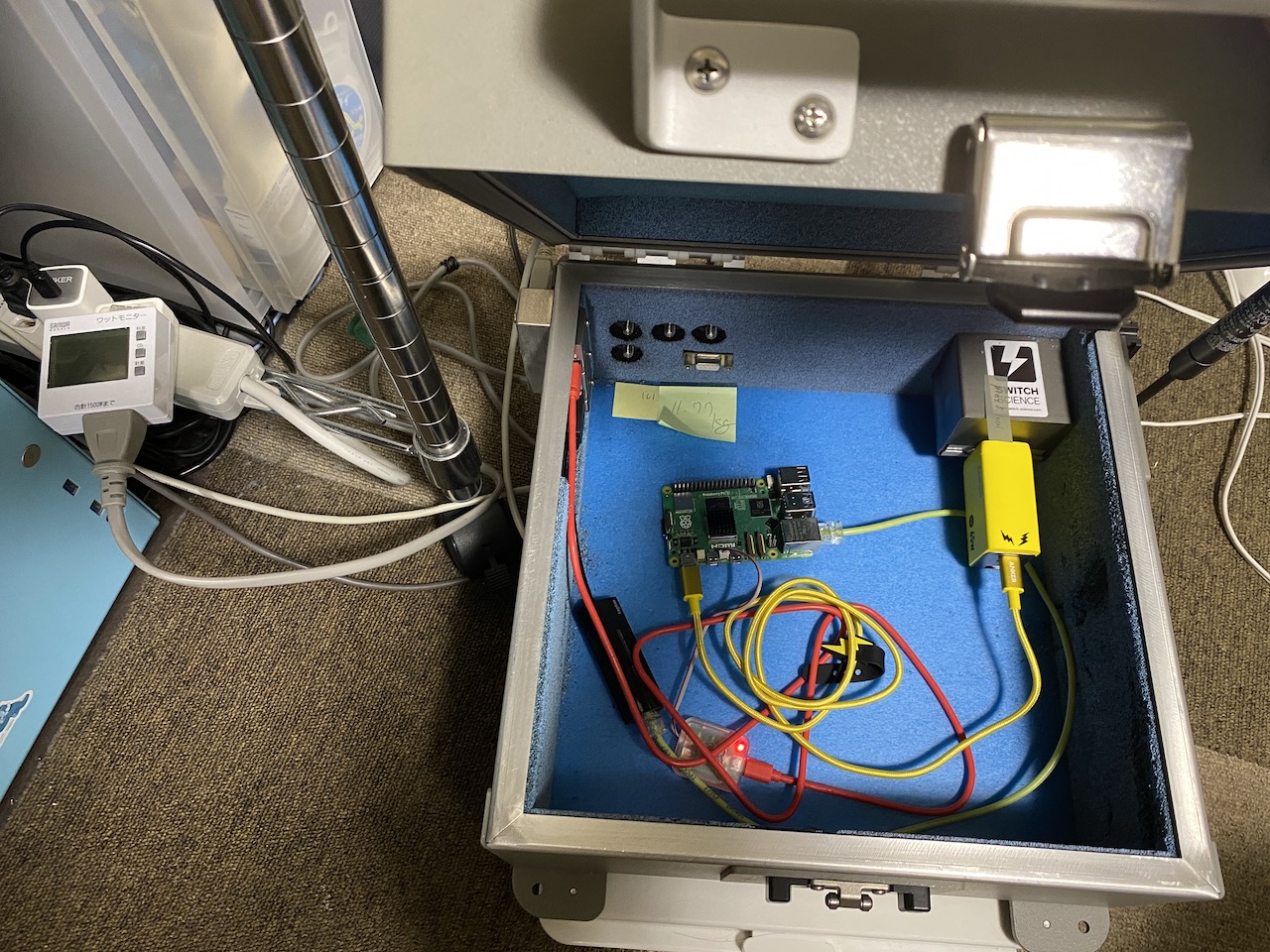
いままでのRaspberry Piなら許された、適当な小さいヒートシンクと、MicroSDカード(Samsung EVO Plus 64GB)の組み合わせで起動してみます。シールドボックスの様子はこちら(Debug Probeが光っていますが、これは端末からの給電のためで、Raspberry Pi 5にはまだ通電していません)。
Raspberry Pi 5内の各デバイスの初期化に関するメッセージや、ブートデバイスを探して起動しようとするメッセージが見られます。そして最後の「Selecting USB low current limit」が、5V/5A電源を検出できず、USBポートの供給は600mAまでとして起動しますよ、というメッセージですね。
起動中にワットモニターが表示した消費電力は、3〜6Wの範囲でした。
このあとのシリアルの出力はOSに変わり、少しするとOSのログインプロンプトが出力されます。
NOTICE: BL31: v2.6(release):v2.6-239-g2a9ede0bd
NOTICE: BL31: Built : 14:26:57, Jun 22 2023
[ 0.902716] spi-bcm2835 107d004000.spi: no tx-dma configuration found - not using dma mode
Debian GNU/Linux 12 pios5 ttyAMA10
pios5 login:
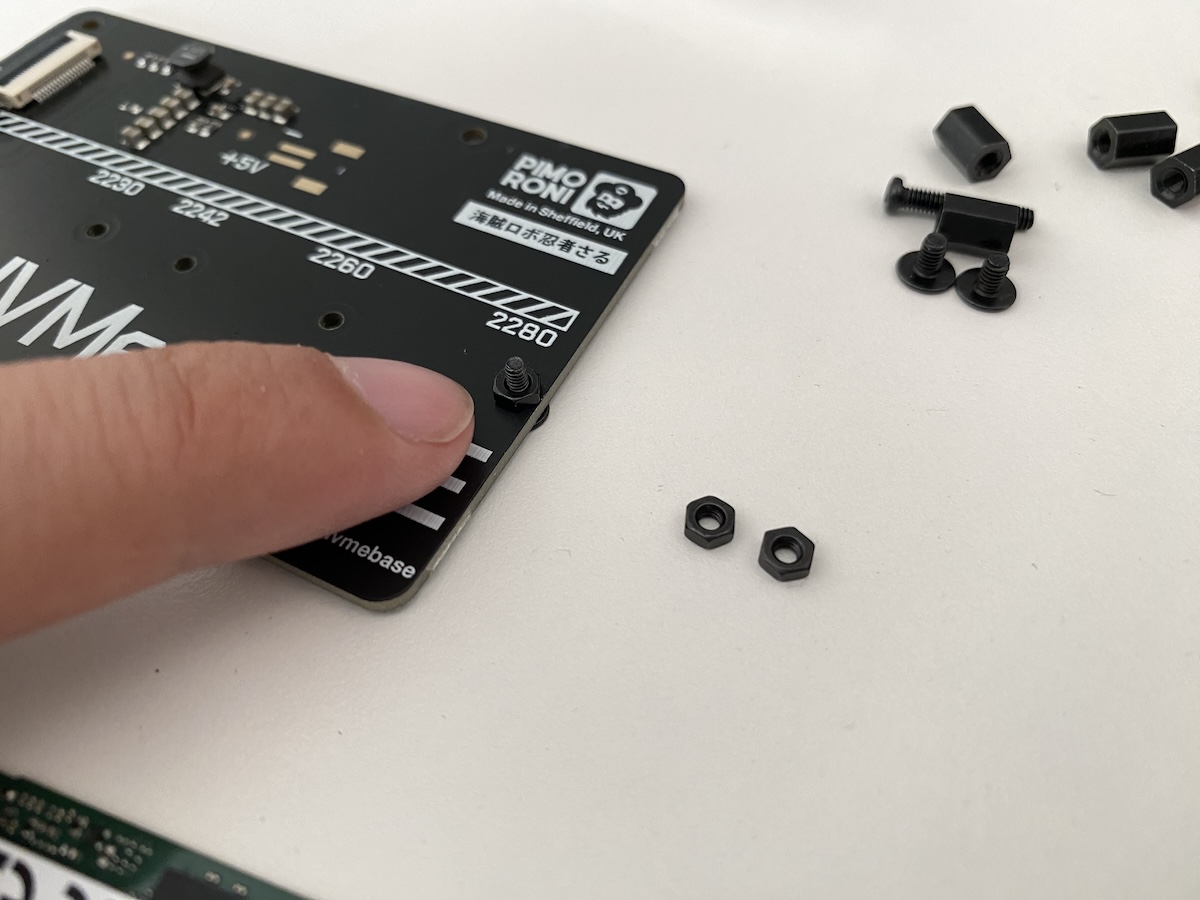
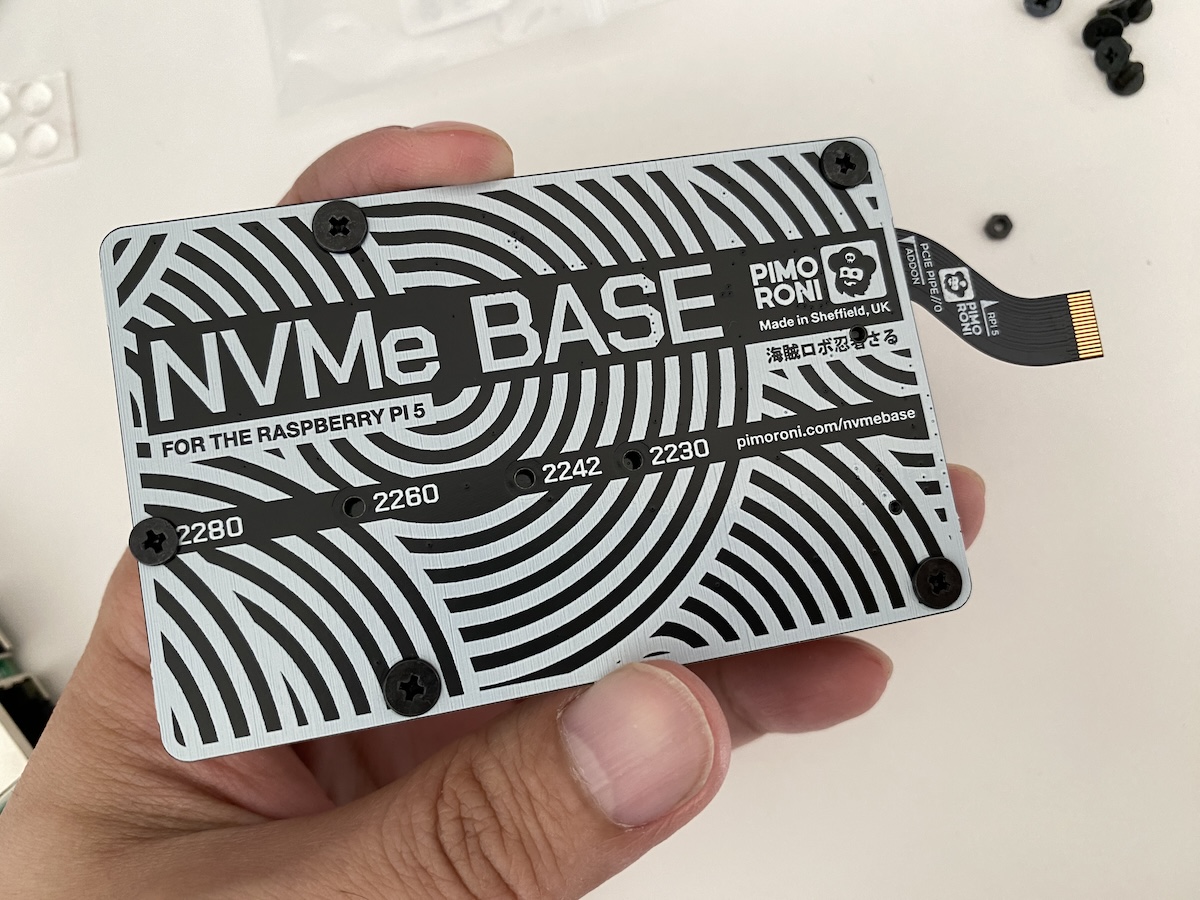
USB SSDブートにするとどうなるか確かめます。NVMe SSDをUSBに変換するケースに入れたものをUSB3.0ポートに接続して起動します。M.2 HATが発売されたら、USB3.0ではなく直接PCI Expressで接続できるようになりますね。USBとPCIeでの速度の違いを確かめたりするのが楽しみです。
通電すると、シリアル通信で以下のメッセージが表示されました。
***
USB boot requires high current (5 volt 5 amp) power supply.
To disable this check set usb_max_current_enable=1 in config.txt
or press the power button to temporarily enable usb_max_current_enable
and continue booting.
See https://rptl.io/rpi5-power-supply-info for more information
***
Raspberry Pi 5のUnixBenchの結果は以下のとおりです。起動OSストレージはUSB SSDを使用してUSBからブートしています。なお、冷却についてはヒートシンクとファンを使用していますが、電波暗箱内に熱がこもってしまうため、冷却についてもう少ししっかり対応すれば結果が変化する可能性がある点についてはご了承ください。
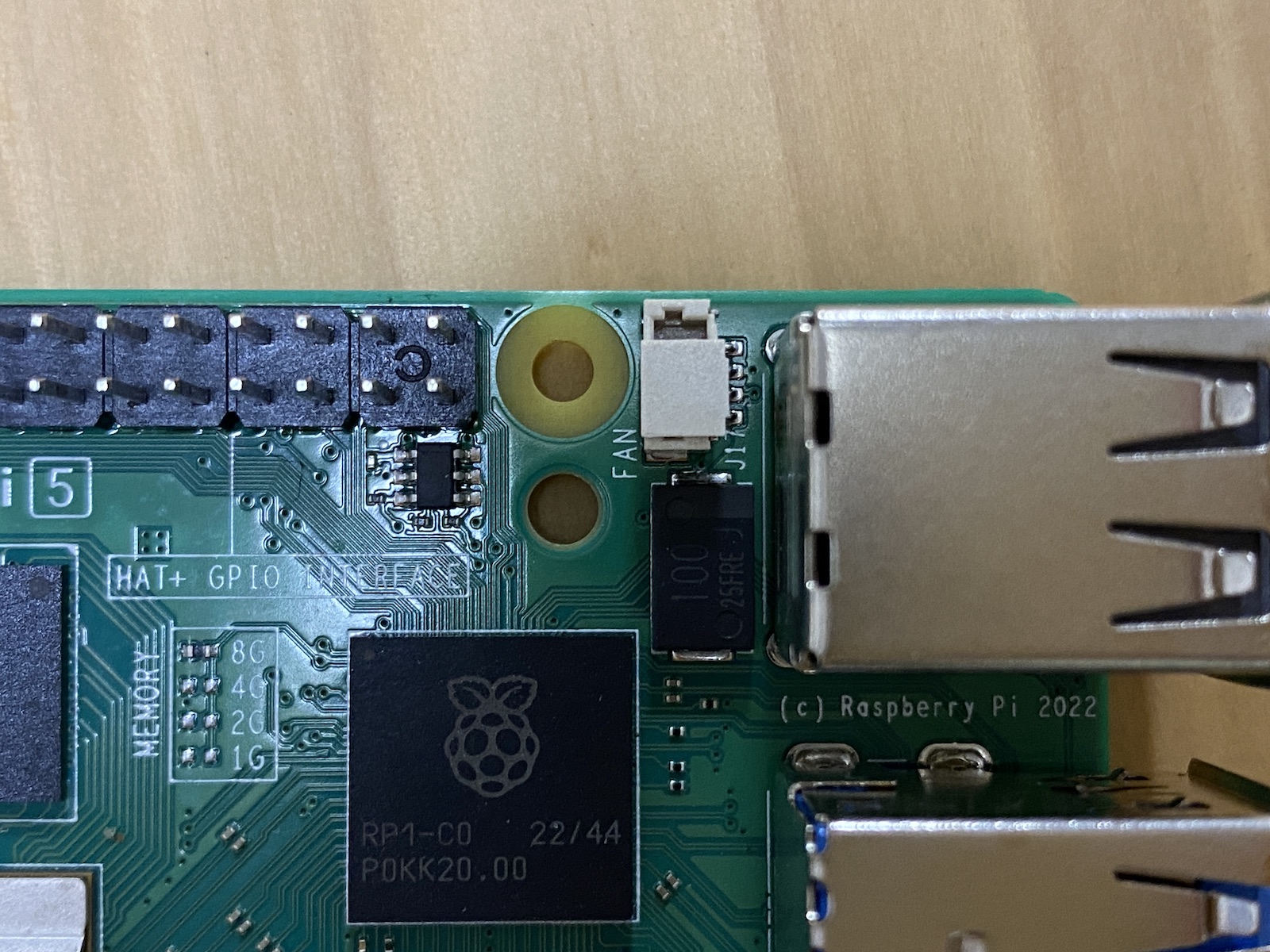
USB3.0ポートは、Raspberry Pi 4ではVL805 USBハブチップによって帯域を共有したものでしたが、Raspbery Pi 5では、RP1チップによって2つのUSB3.0+USB2.0ポートが提供されるようになったため、どちらのUSB3.0ポートを使用しても性能を引き出すことが可能になりました。
***
USB boot requires high current (5 volt 5 amp) power supply.
To disable this check set usb_max_current_enable=1 in config.txt
or press the power button to temporarily enable usb_max_current_enable
and continue booting.
See https://rptl.io/rpi5-power-supply-info for more information
***
一般的なUSB PD電源は5Vの場合3Aまでの出力のため、これをRaspberry Pi 5で使用すると、USBデバイスへの供給が600mAに制限されたり、電力が不足する可能性があります。よって、オフィシャルの電源も必要な機能性があります。ただ、PSEの取得問題が起こるので、これは悩ましい問題かもしれません。幸い(?)日本はRaspberry Pi 5のいわゆる技適取得で他国より発売が遅れるため、待っている間に先に利用できる国のユーザーがどう対処するかの知見を得ることができるでしょう……。
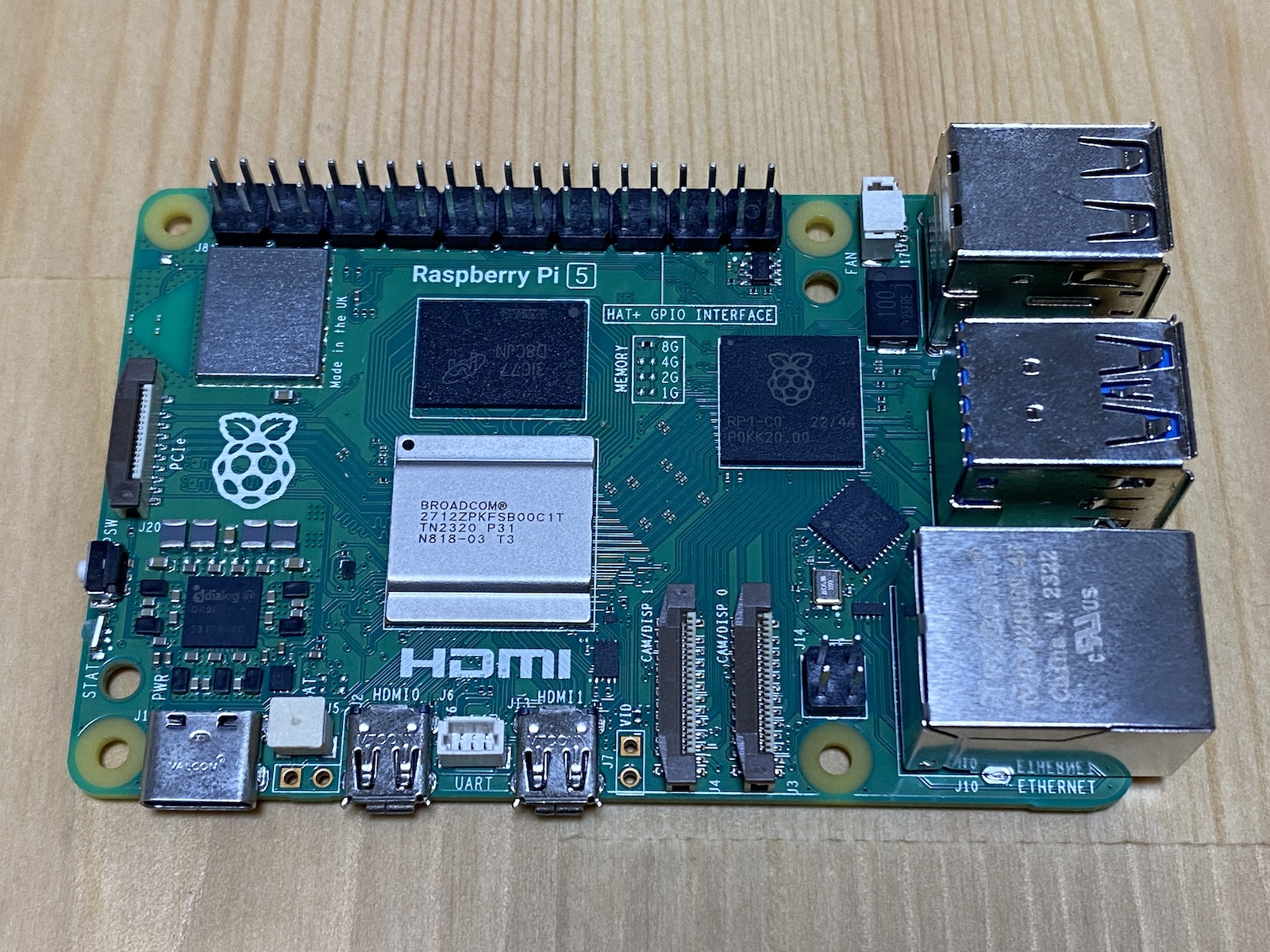
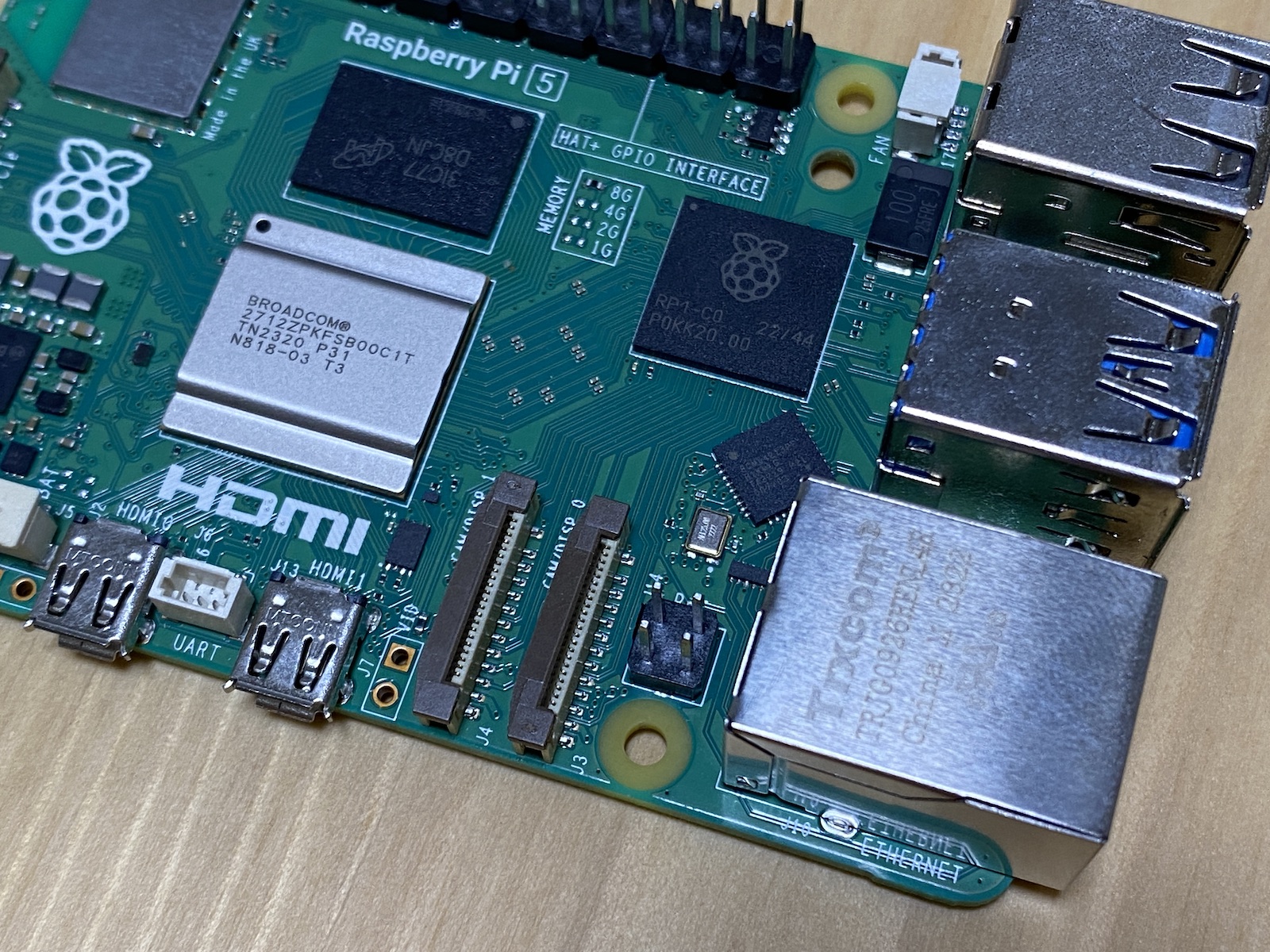
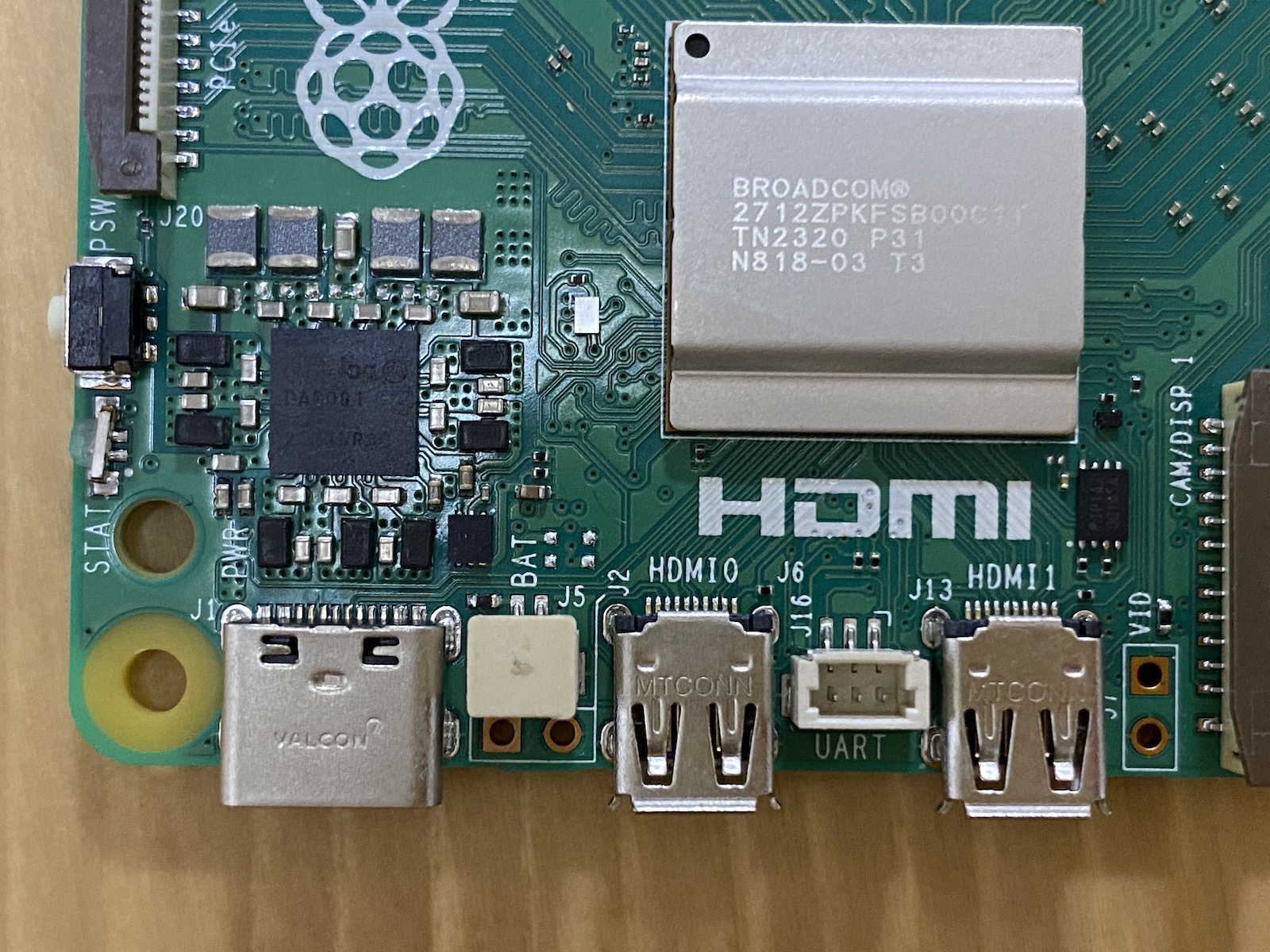
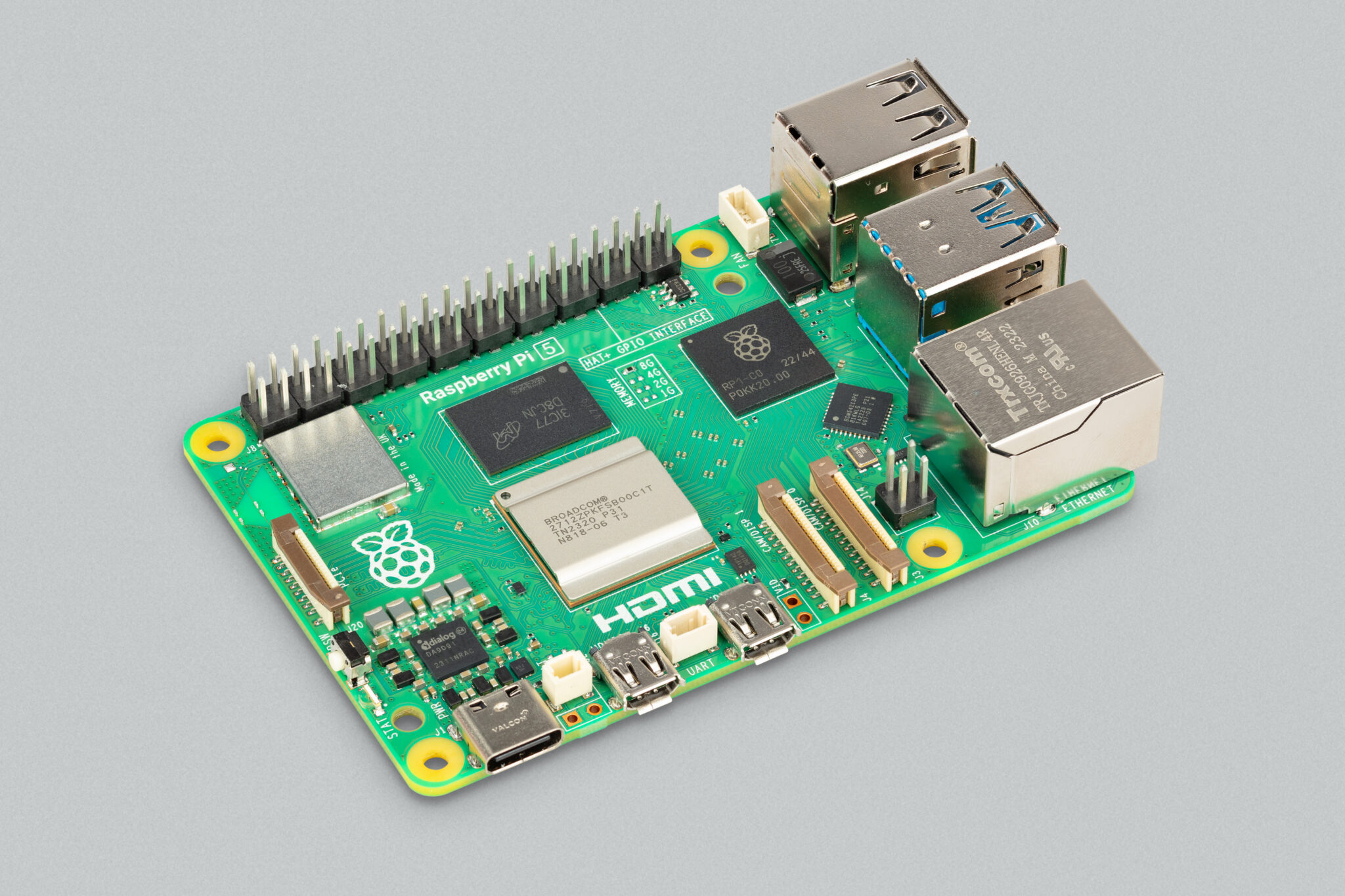
SoCには、Cortex-A76を採用したBroadComのBCM2712が搭載されました。Cortex-A76といえば2018年頃のコアですが、MacBook2015やIntelのSkylake世代に近い性能とされ、現在でも日常的な用途では不足がない性能をRaspberry Pi 5で使えるようになったことは大きな進化と言えます。
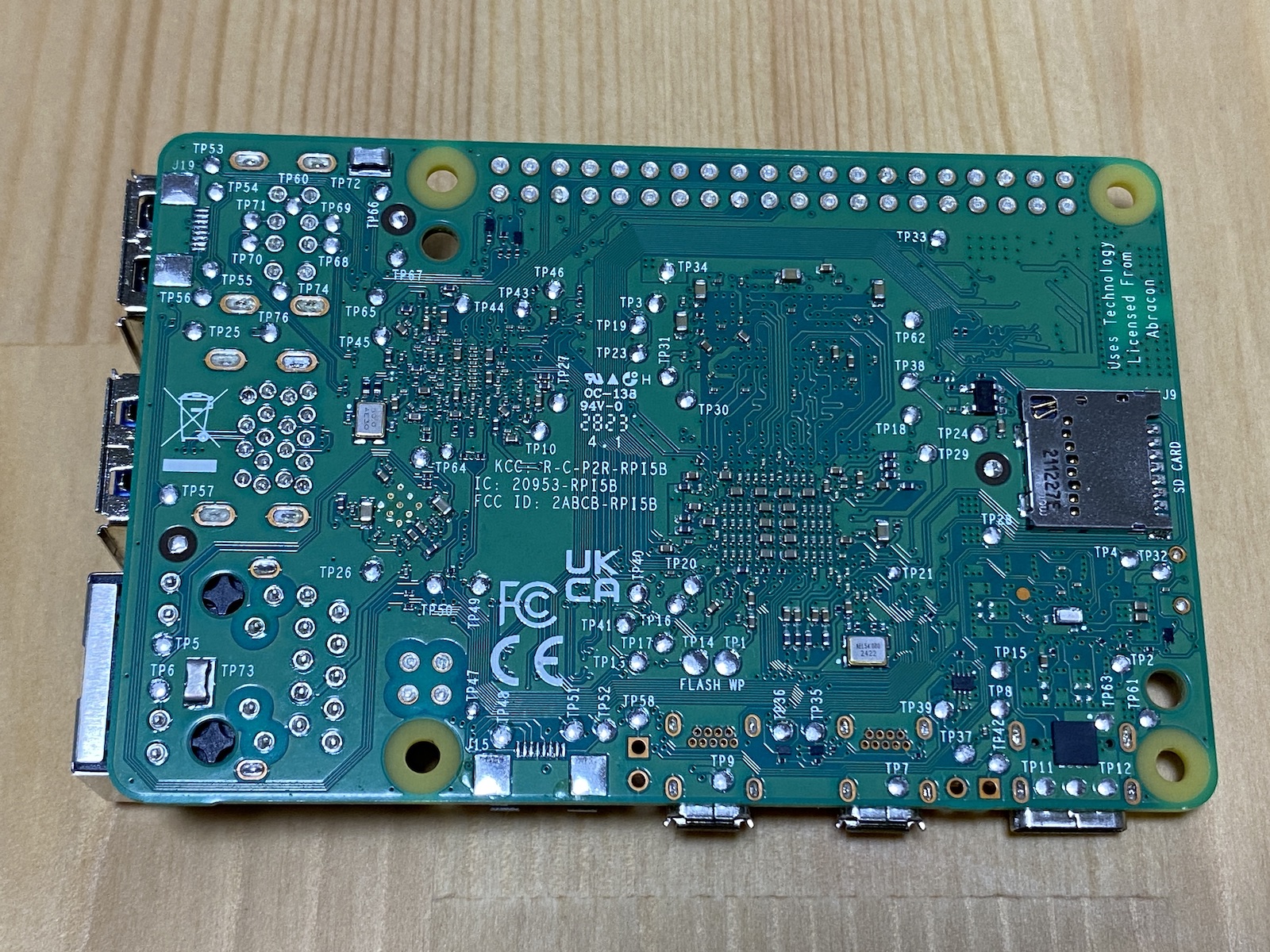
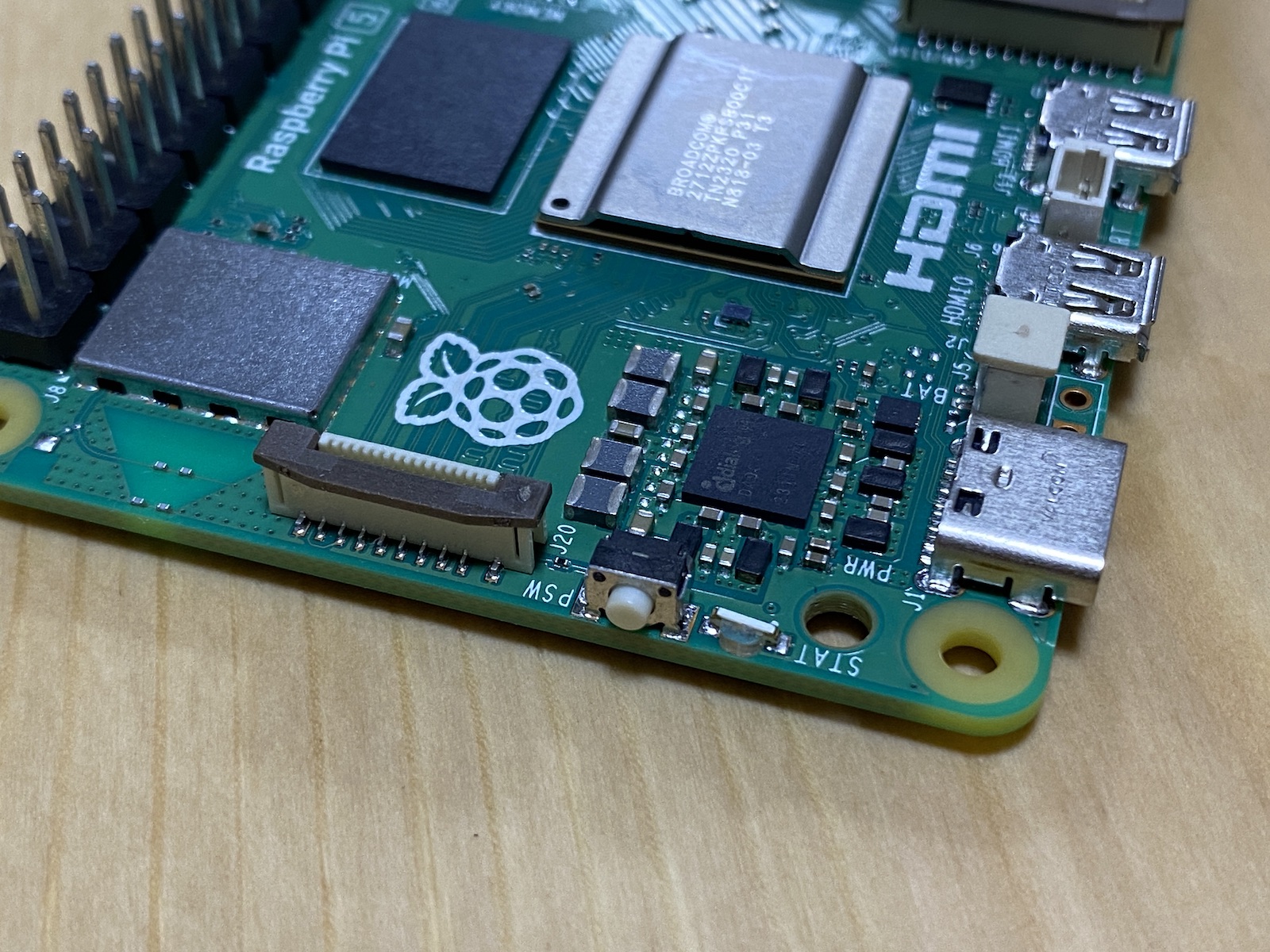
Raspberry Pi 1 Model B+以降微動だにしなかったCSI・DSIポートの配置が変更されました。CSIポートがあった位置に2つ並ぶ形で配置され、デュアルのCSI・DSI共通ポートとして利用できるようになりました。つまり、これまでCompute Moduleでしかできなかったデュアルカメラ・デュアルDSIディスプレイがRaspberry Pi 5で扱えるようになったことを意味します。
なお、ポート形状はCompute Module、Raspberry Pi Zeroと同じ小さいタイプのケーブルになります。CSIケーブルはZeroと同じものが利用できますが、DSIケーブルはCSIケーブルと配線が異る点に注意が必要です。今回のリリースに合わせてオフィシャルのケーブルアクセサリが発売されたため、利用の際にはケーブルの用意も検討すると良いでしょう。
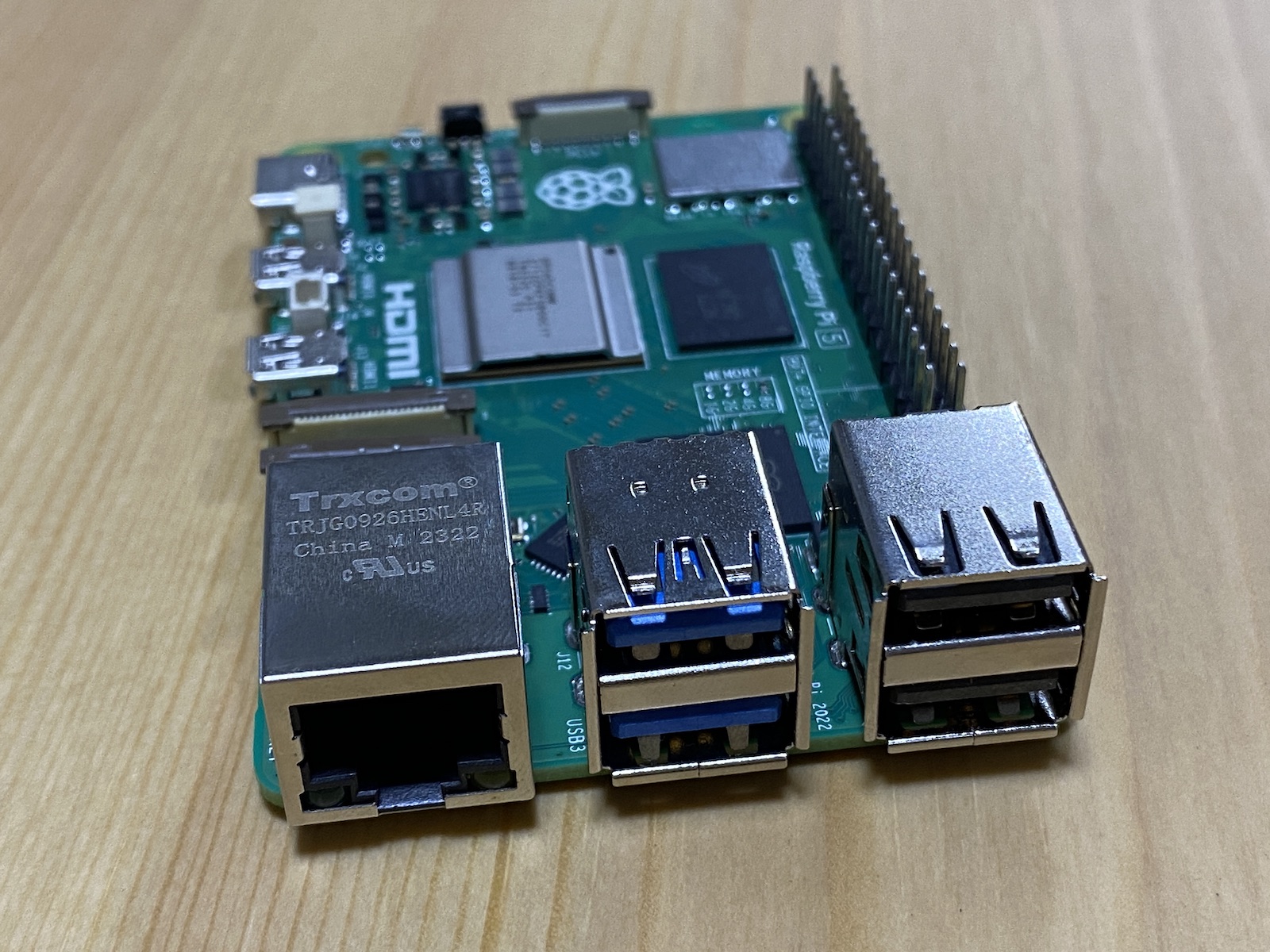
LANポートが再び移動。USB3.0はより高速に。
LANポートが3B+以前と同様、HDMIポート側に移動しました。PoE用のピンも移動したため、過去に発売されたPoE HATとの互換性が失われています。こちらも、Raspberry Pi 5のPoE HATが今後発売される予定です。
USB3.0ポートの配置はRaspberry Pi 4と変わらず真ん中に2ポート配置されています。Raspberry PiではVL805 USBハブチップによる分配でしたが、今回は2つの独立したコントローラーから提供されているため、同時にUSB3.0の帯域を使うことが可能になりました。
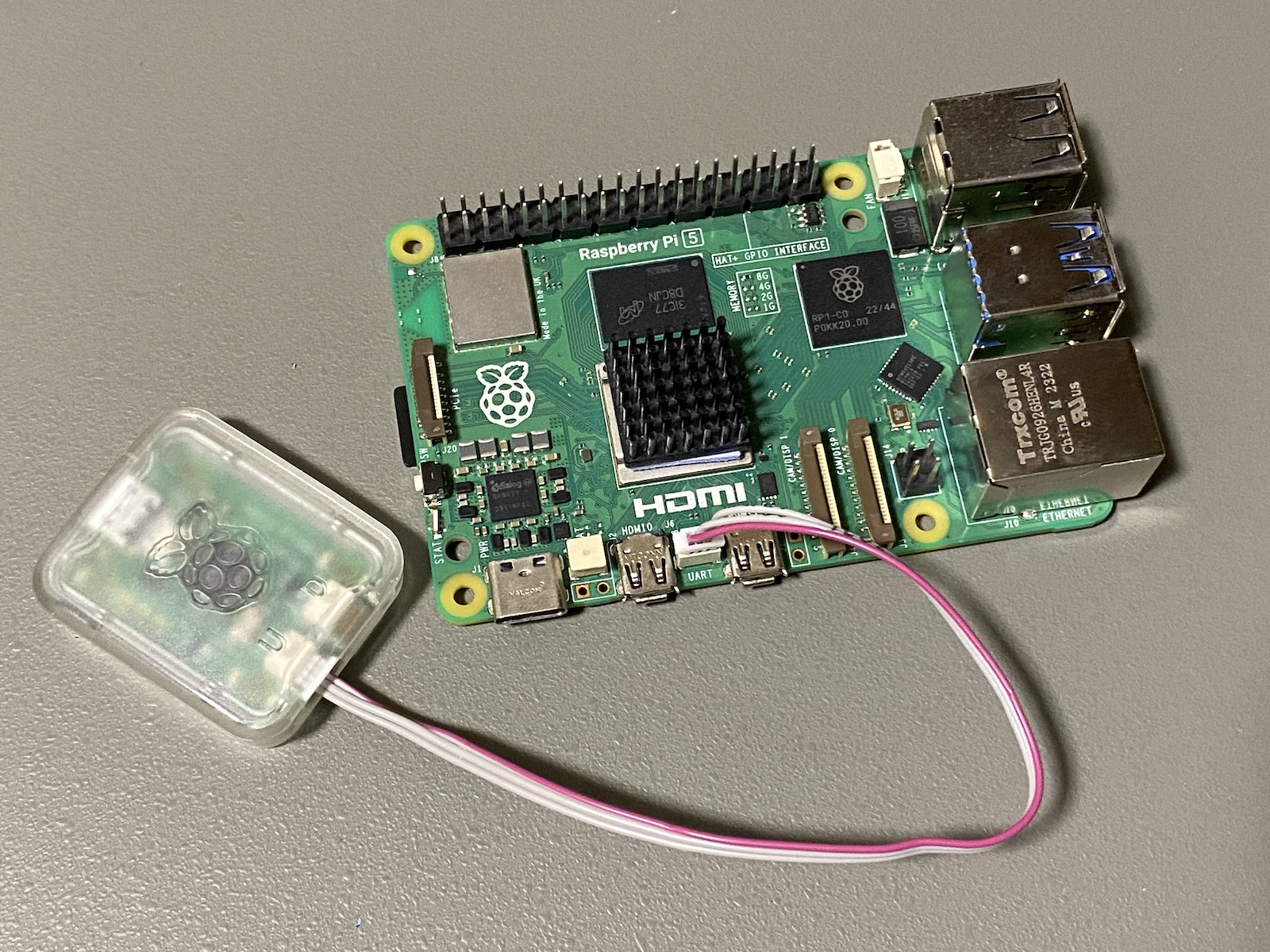
独立したUARTポート
UARTポートがGPIOから独立して、HDMI0とHDMI1の間に配置されました。このポートはRaspberry Pi Debug Probeを接続して、115200 baud rateで使うことができます。また、OS起動前のDiagもここから取得できるようになりました。
「27W USB-C PD Power Supply」は、Power Deliveryに対応したRaspberry Pi 5向けの電源アダプターです。Raspberry Pi 5のUSBポートで電源供給できる合計容量はデフォルトでは600mAですが、USB PD電源を使用することで自動で1.6Aに増強されます。また、電源アダプターは9V3A、12V2.25A、15V1.8Aの出力にも対応します。
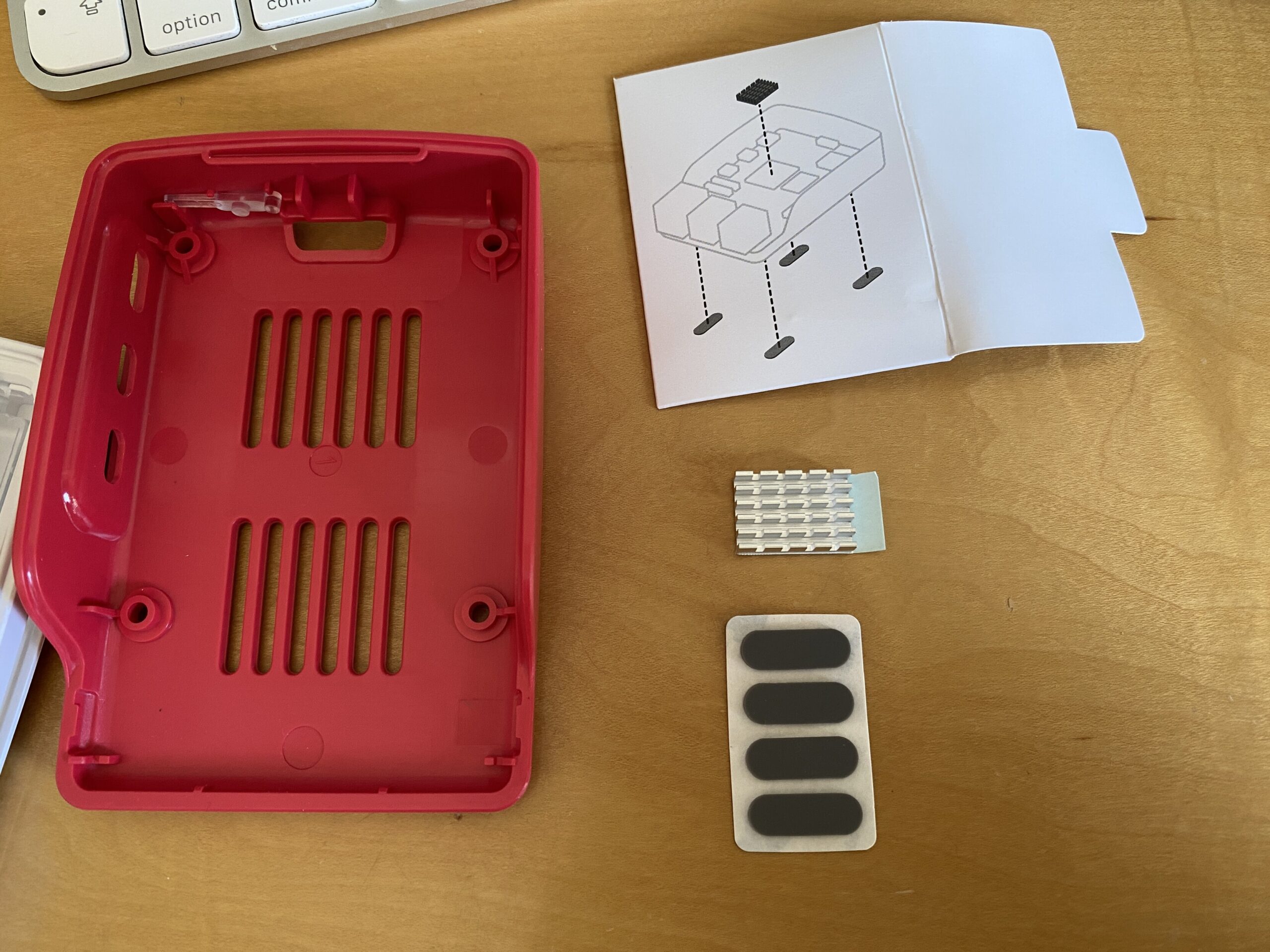
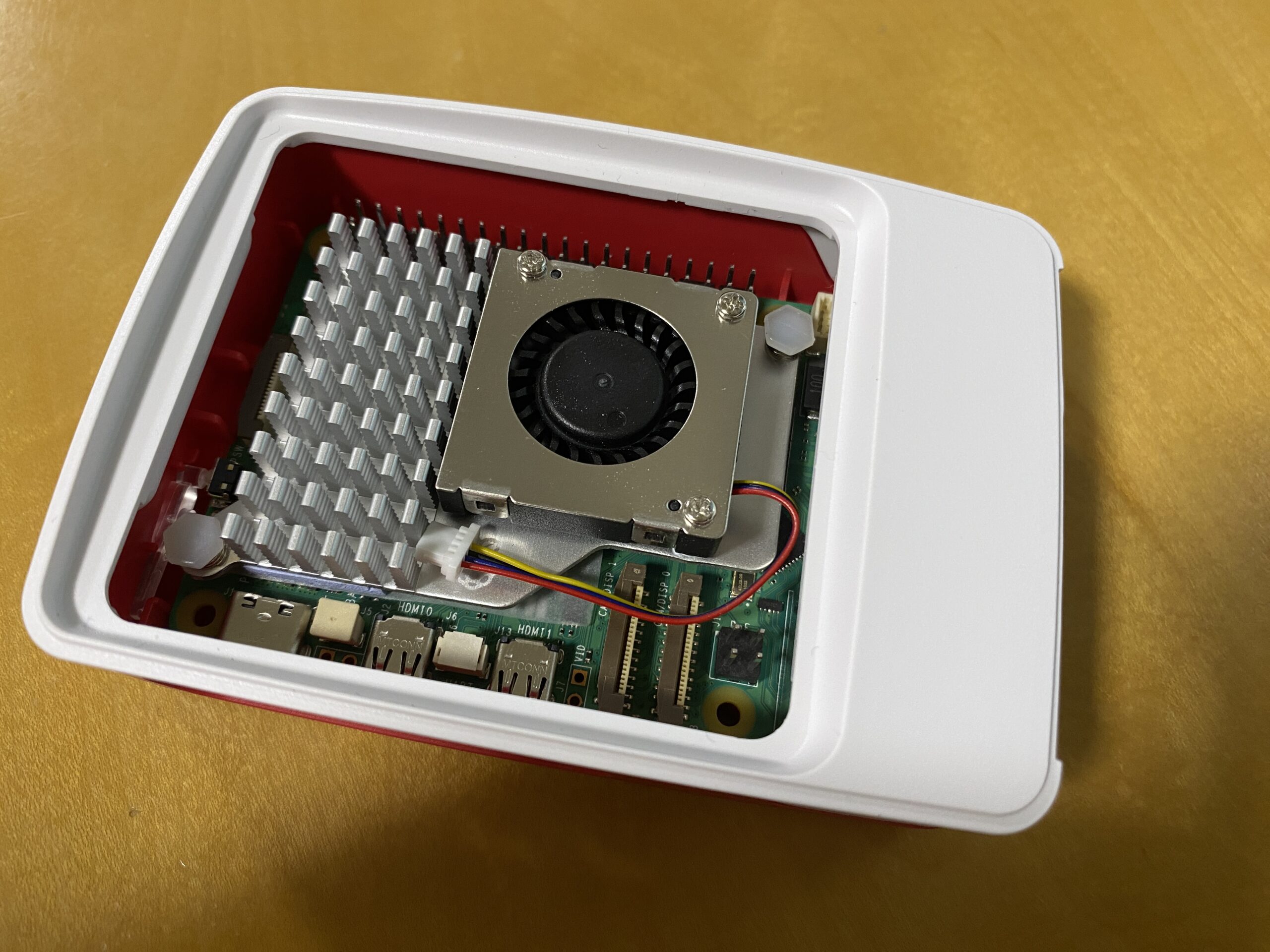
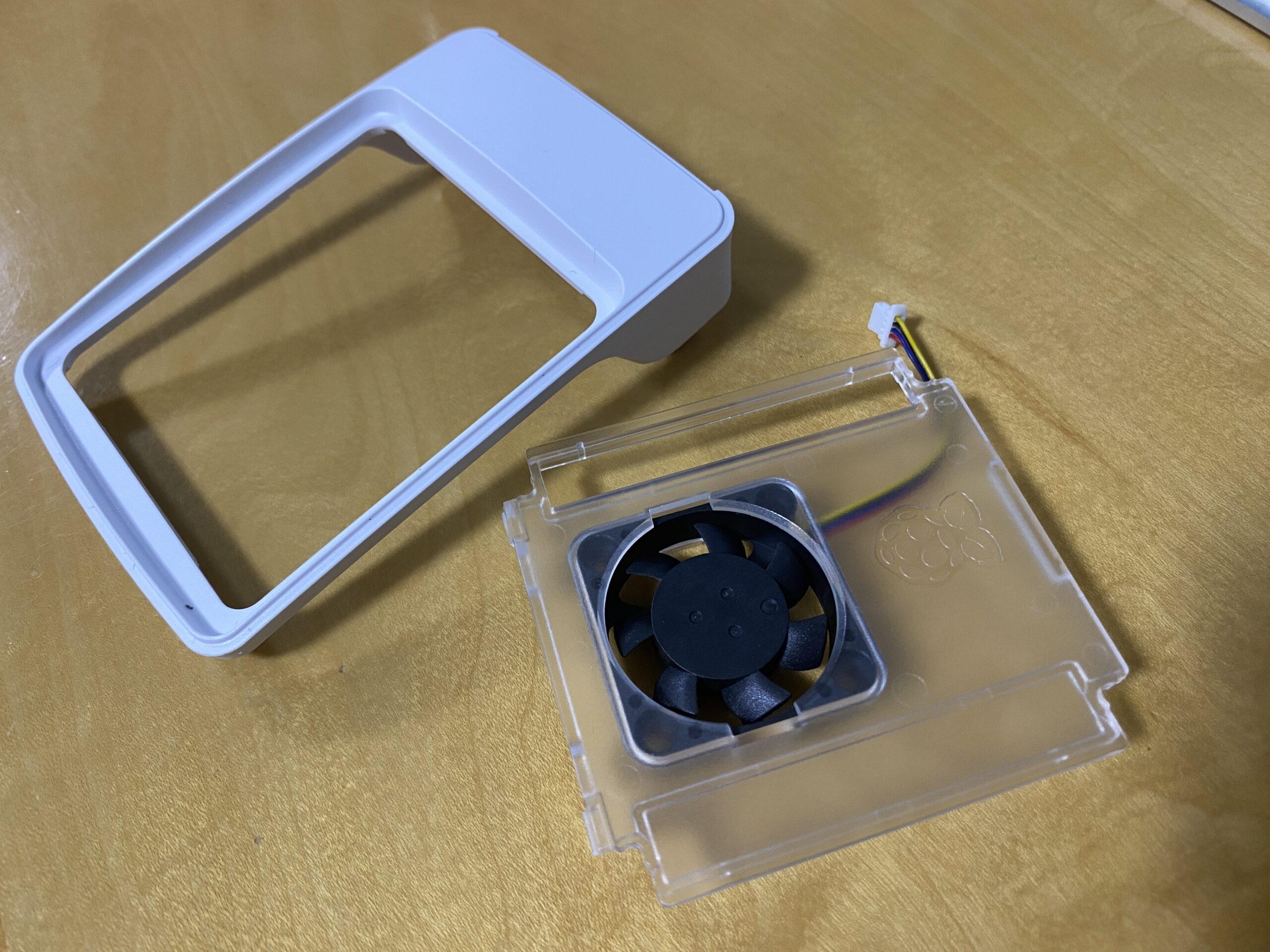
「Raspberry Pi 5 Case」は、新しい専用ケースです。可変速ファンを搭載しており、Raspberry Pi 5のファン専用コネクターに接続することで使用できます。カラーは赤・白の他に、グレーの販売も予定されています。