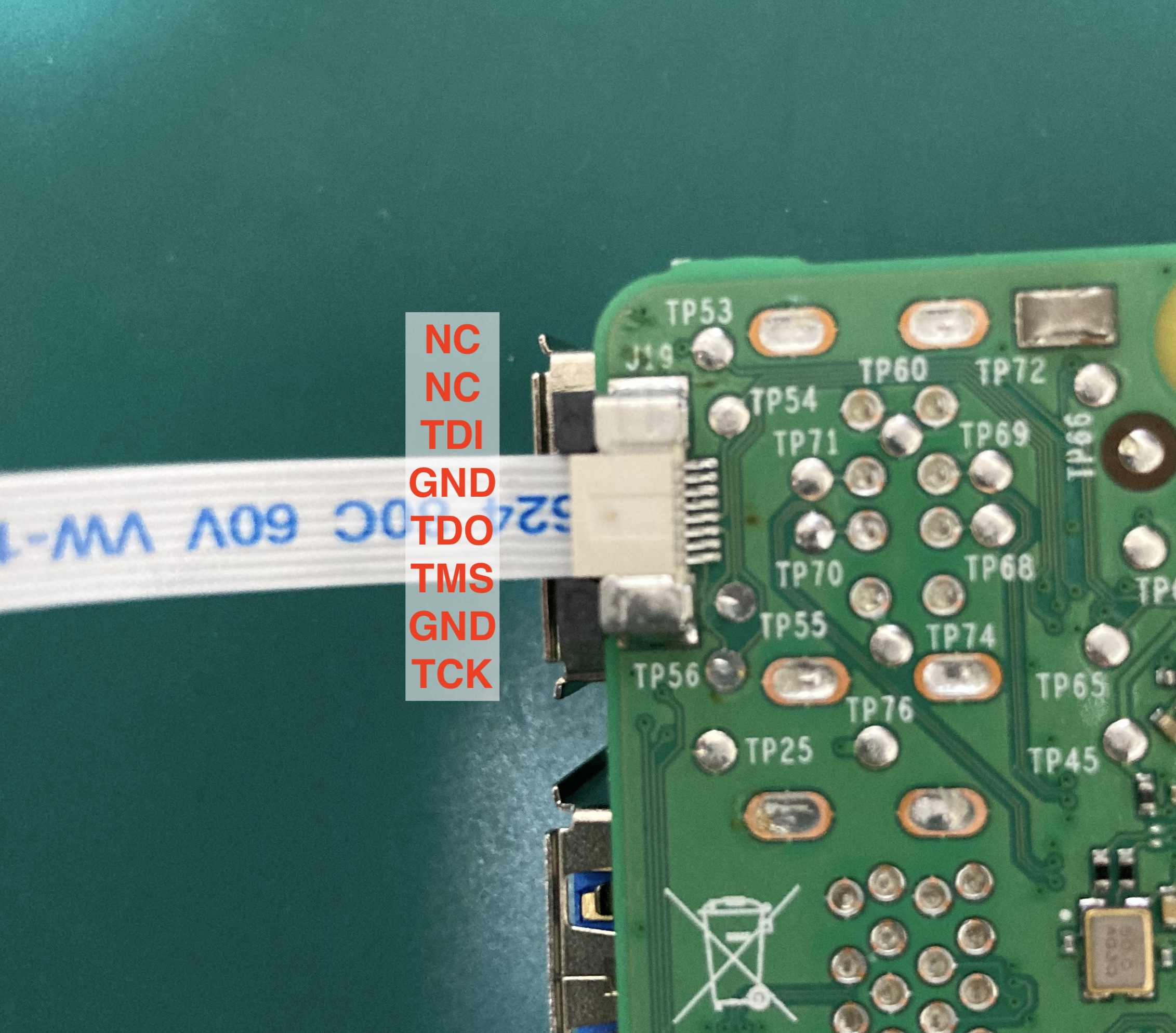
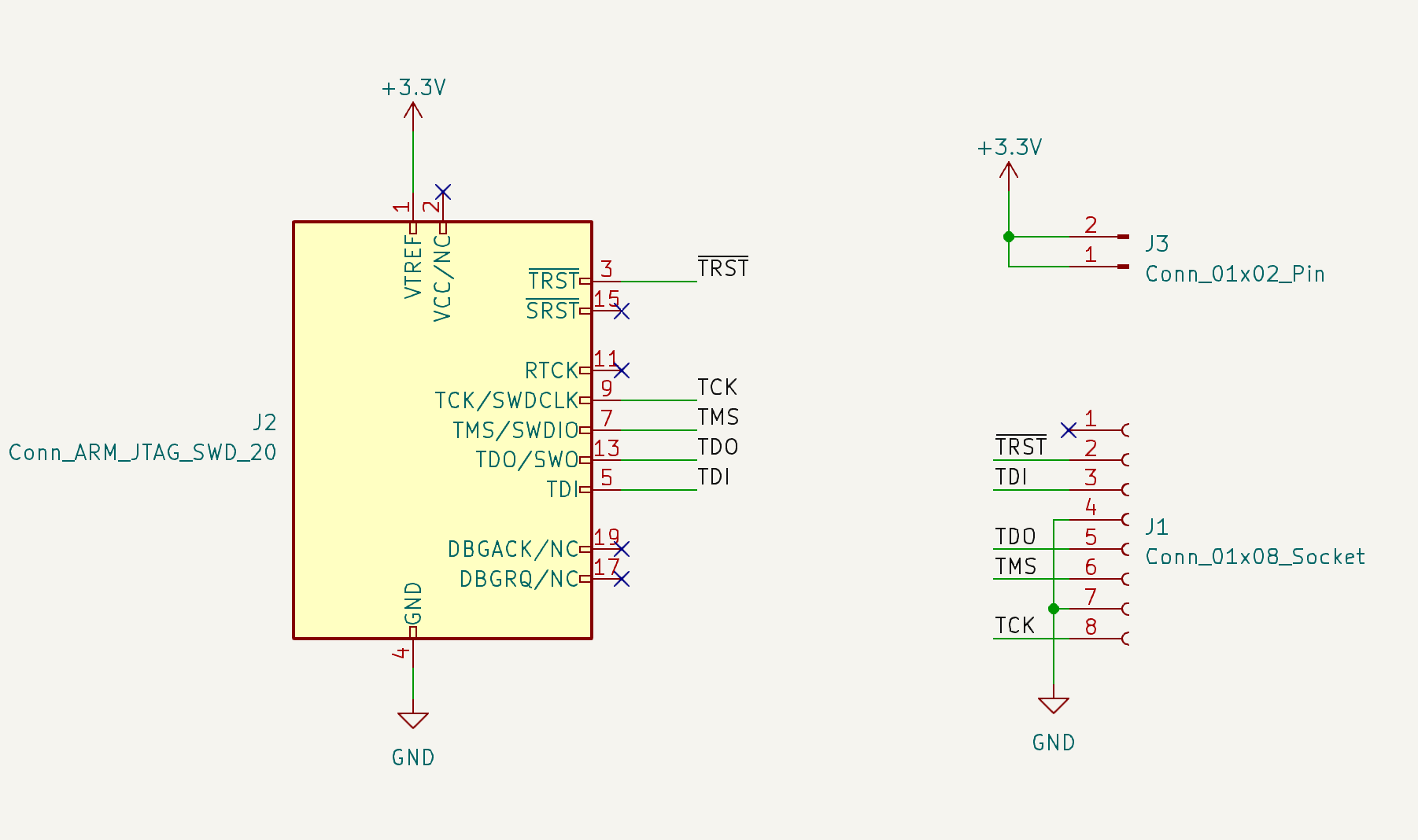
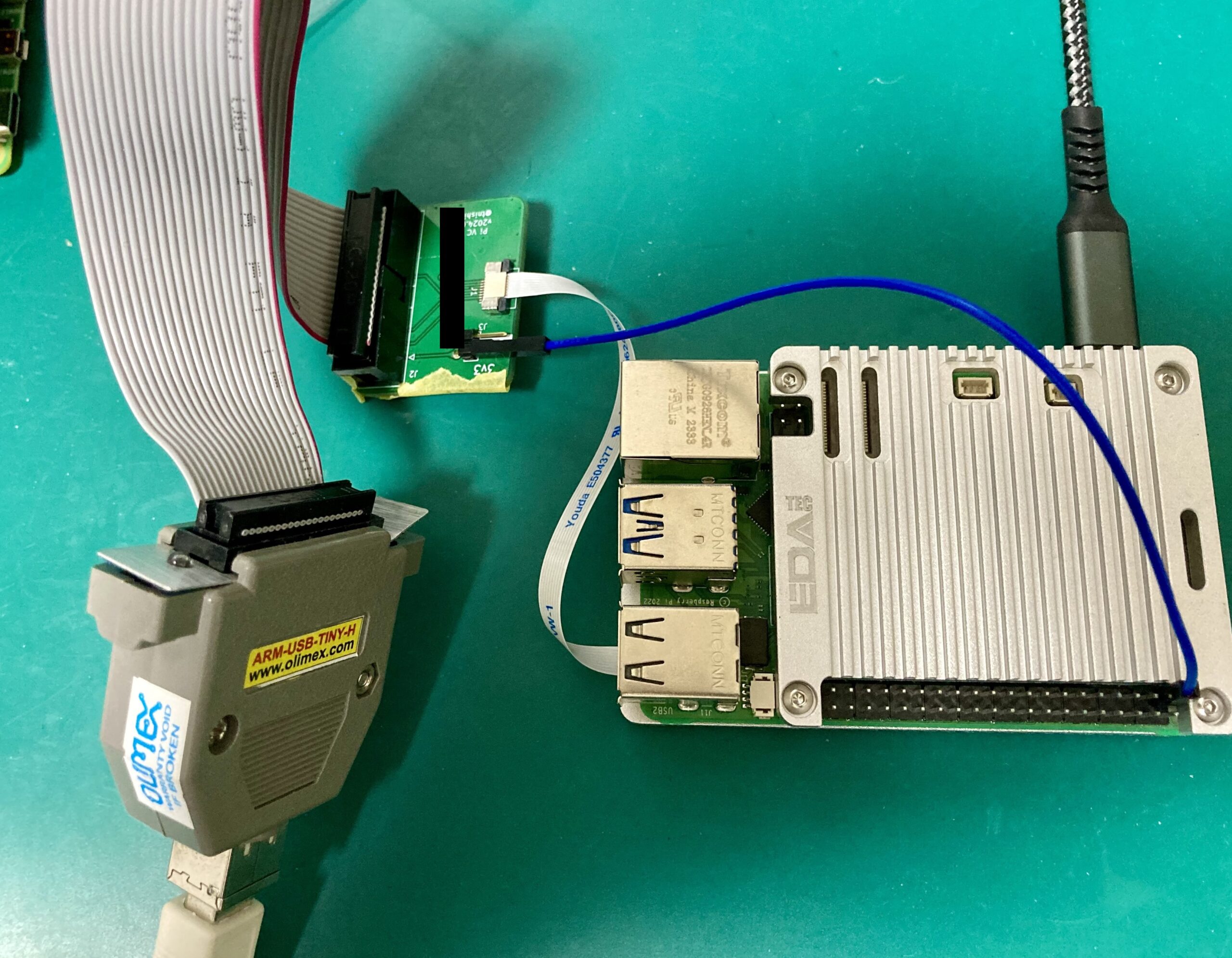
実際に自分も0.5mmピッチのフレキシブルケーブルと端子を購入してJTAGデバッガーとつなげて様子を見てみたところ、Raspberry Pi Trading LtdのTAPが見つかりました。
~/p/t/r/pi5_jtag ❯❯❯ openocd -f interface/ftdi/olimex-arm-usb-tiny-h.cfg -c 'transport select jtag'
Open On-Chip Debugger 0.12.0
Licensed under GNU GPL v2
For bug reports, read
http://openocd.org/doc/doxygen/bugs.html
jtag
Info : Listening on port 6666 for tcl connections
Info : Listening on port 4444 for telnet connections
Warn : An adapter speed is not selected in the init scripts. OpenOCD will try to run the adapter at the low speed (100 kHz)
Warn : To remove this warnings and achieve reasonable communication speed with the target, set "adapter speed" or "jtag_rclk" in the init scripts.
Warn : libusb_detach_kernel_driver() failed with LIBUSB_ERROR_ACCESS, trying to continue anyway
Info : clock speed 100 kHz
Warn : There are no enabled taps. AUTO PROBING MIGHT NOT WORK!!
Info : JTAG tap: auto0.tap tap/device found: 0x20001927 (mfg: 0x493 (Raspberry Pi Trading Ltd), part: 0x0001, ver: 0x2)
Warn : AUTO auto0.tap - use "jtag newtap auto0 tap -irlen 5 -expected-id 0x20001927"
Warn : gdb services need one or more targets defined
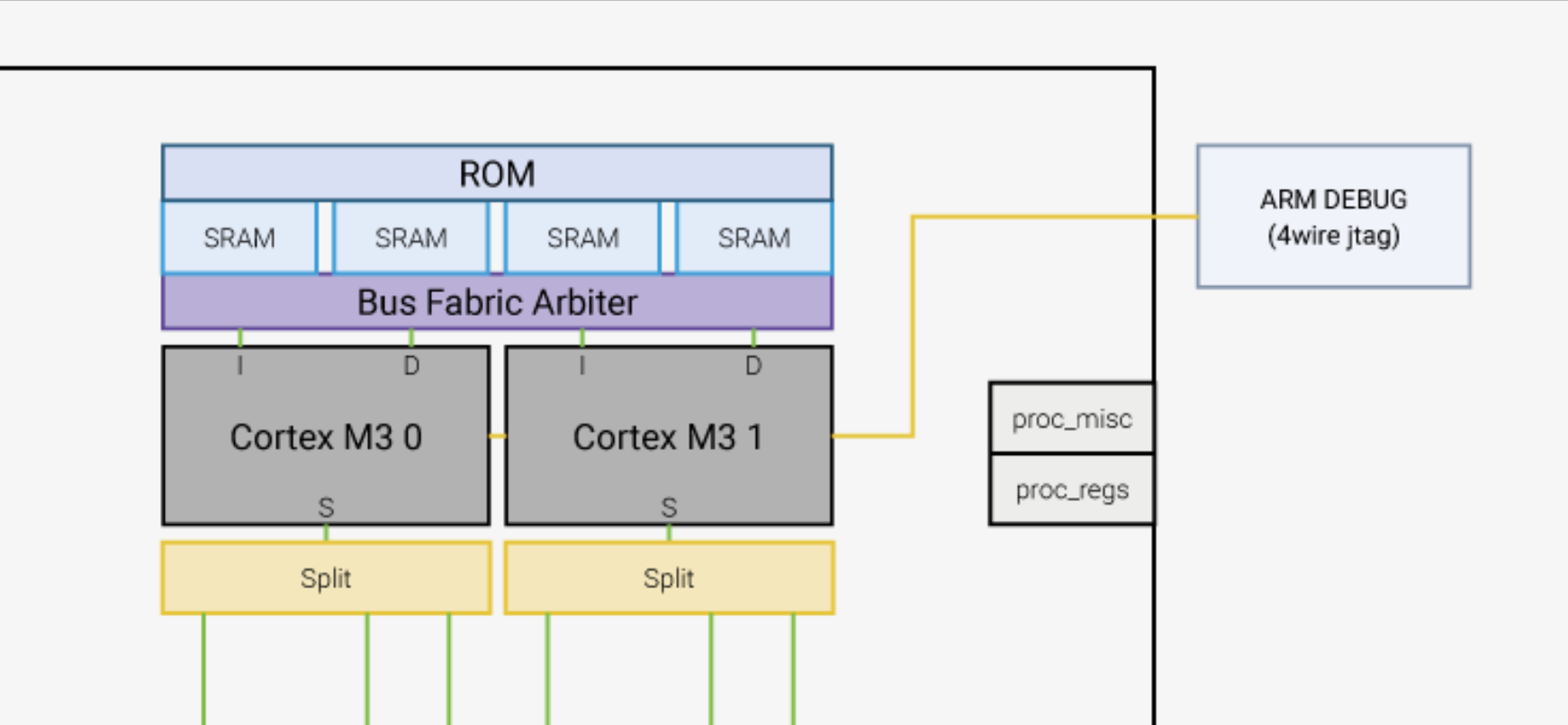
これがRP1のCortex-M3コアのTAPと考えてDAPの接続等を試行しましたが、うまくいきませんでした。 Arm Debug Interfaceでは命令ビット長は4または8bitと決められていますが、OpenOCDがAutoProbeで見つけた命令ビット長は5bitなので、合っていません。 よって、Cortex-M3以外の何らかのTAPが見えていると考えられます。
~/p/t/r/pi5_jtag ❯❯❯ openocd -f interface/ftdi/olimex-arm-usb-tiny-h.cfg -f rp1.cfg
Open On-Chip Debugger 0.12.0
Licensed under GNU GPL v2
For bug reports, read
http://openocd.org/doc/doxygen/bugs.html
3758153728
Info : Listening on port 6666 for tcl connections
Info : Listening on port 4444 for telnet connections
Warn : libusb_detach_kernel_driver() failed with LIBUSB_ERROR_ACCESS, trying to continue anyway
Info : clock speed 100 kHz
Info : JTAG tap: cpu0.cpu tap/device found: 0x4ba00477 (mfg: 0x23b (ARM Ltd), part: 0xba00, ver: 0x4)
Info : JTAG tap: cpu1.cpu tap/device found: 0x4ba00477 (mfg: 0x23b (ARM Ltd), part: 0xba00, ver: 0x4)
Info : [cpu0] Cortex-M3 r2p1 processor detected
Info : [cpu0] target has 6 breakpoints, 4 watchpoints
Info : [cpu1] Cortex-M3 r2p1 processor detected
Info : [cpu1] target has 6 breakpoints, 4 watchpoints
Info : gdb port disabled
Info : starting gdb server for cpu0 on 3333
Info : Listening on port 3333 for gdb connections
Info : gdb port disabled
Info : starting gdb server for cpu1 on 3334
Info : Listening on port 3334 for gdb connections
Raspberry Pi 5からのハードウェアデバッグは、Raspberry Pi 4までと比べて以下の点が変わっていました。
デバッグインターフェイスがJTAGからSWDに変わった
デバッグ用端子が出ている場所が40pin GPIOからUART/デバッグ用コネクタに変わった
UARTとハードウェアデバッグ機能は排他
Raspberry Pi Debug Probeがあれば簡単に接続可能
デバッグ・CTIのアドレスが変わった
OpenOCDの設定ファイルに変更が必要
デバッグの仕組みがSWDに変わったので、Raspberry Pi 4まで利用していたJTAGデバッガーは使えなくなりました。 一方、Raspberry Pi Debug Probeは一般的なデバッガーの中では比較的安価ですし、接続もケーブル1本でよくなりました。 そのため、全体的なデバッグの敷居は低くなった印象です。
Raspberry Pi ImagerなどでRaspberry Pi OS(64bit)をmicroSDカードに書き込んでください。 その後、第1パーティション(Raspberry Pi OS上からは /boot/firmware/ 以下)の config.txt の末尾に以下の行を追記してください。
enable_jtag_gpio=1
この設定を入れることでRaspberry Pi 5のUART端子の機能が起動時にSWDへ変わり、デバッガーをつなげるようになります。
接続
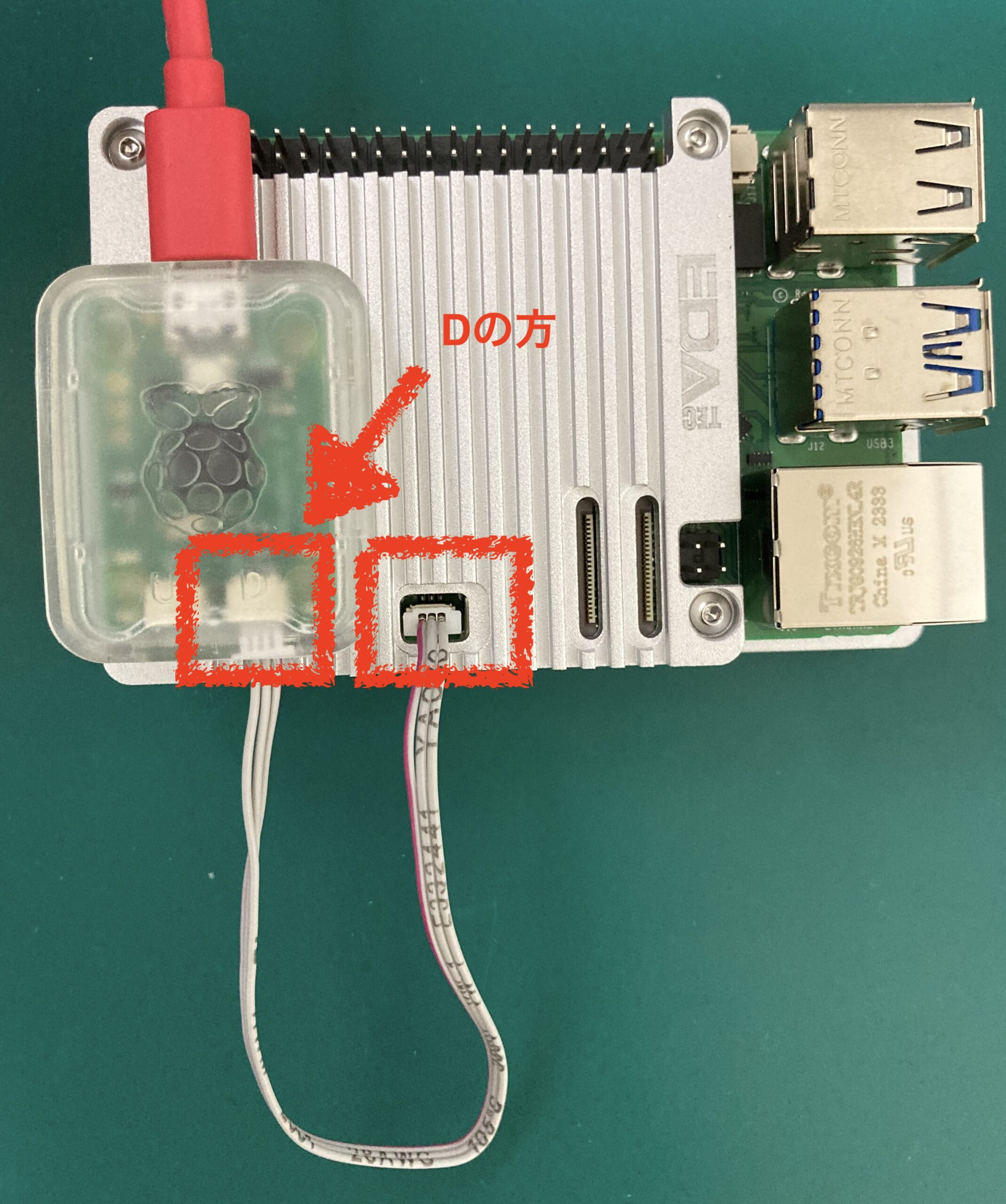
以下の画像を参考に、Raspberry Pi 5のUART端子(HDMI端子の間)とDebug ProbeのSWD端子(右側のDと書かれたほう)をコネクタで繋いでください。
OpenOCDを使ってデバッグを行う際は、デバッグターゲットの設定ファイルが必要です。 ROM infoから得られる情報を用いてRaspberry Pi 5に搭載されているBCM2712用の設定ファイルを作ったので、以下を適当な場所に保存してください。 (OpenOCDに含まれる target/bcm2711.cfg をベースに作成したので、このファイルのライセンスは元ファイルと同じくGPL2.0で提供します)
# bcm2712.cfg
# SPDX-License-Identifier: GPL-2.0-or-later
# OpenOCD target config file
# This file is based on target/bcm2711.cfg
# I have checked that it works with Open On-Chip Debugger 0.12.0
# using the Raspberry Pi Debug-Probe interface
transport select swd
adapter speed 1000
if { [info exists CHIPNAME] } {
set _CHIPNAME $CHIPNAME
} else {
set _CHIPNAME bcm2712
}
if { [info exists CHIPCORES] } {
set _cores $CHIPCORES
} else {
set _cores 4
}
if { [info exists USE_SMP] } {
set _USE_SMP $USE_SMP
} else {
set _USE_SMP 0
}
if { [info exists DAP_TAPID] } {
set _DAP_TAPID $DAP_TAPID
} else {
set _DAP_TAPID 0x2ba00477
}
# swj_newdap $_CHIPNAME cpu -irlen 4 -ircapture 0x1 -irmask 0xf -expected-id $_DAP_TAPID
swd newdap $_CHIPNAME cpu -expected-id $_DAP_TAPID
dap create $_CHIPNAME.dap -chain-position $_CHIPNAME.cpu
# MEM-AP for direct access
target create $_CHIPNAME.ap mem_ap -dap $_CHIPNAME.dap -ap-num 0
# these addresses are obtained from the ROM table via 'dap info 0' command
set _DBGBASE {0x80010000 0x80110000 0x80210000 0x80310000}
set _CTIBASE {0x80020000 0x80120000 0x80220000 0x80320000}
set _smp_command "target smp"
for { set _core 0 } { $_core < $_cores } { incr _core } {
set _CTINAME $_CHIPNAME.cti$_core
set _TARGETNAME $_CHIPNAME.cpu$_core
cti create $_CTINAME -dap $_CHIPNAME.dap -ap-num 0 -baseaddr [lindex $_CTIBASE $_core]
target create $_TARGETNAME aarch64 -dap $_CHIPNAME.dap -ap-num 0 -dbgbase [lindex $_DBGBASE $_core] -cti $_CTINAME
set _smp_command "$_smp_command $_TARGETNAME"
}
if {$_USE_SMP} {
eval $_smp_command
}
# default target is cpu0
targets $_CHIPNAME.cpu0
以上で準備は完了です。
ハードウェアデバッグ
ここからは実際にOpenOCDを立ち上げてデバッグを行ってみます。
OpenOCDの起動
さきほど取得したファイル等を用いてOpenOCDを起動し、Raspberry Pi 5に接続します。 Raspberry Pi 5の電源を入れて数秒待った後(※)、以下のコマンドをPC上で実行してください。 (※: 最初しばらくはブートローダーのログ出力のために使われるので、SWD機能に変わるのを待つ必要があります)
openocd -f interface/cmsis-dap.cfg -f bcm2712.cfg
うまく接続ができれば、以下のようなログが出てきます。
~/p/t/r/pi5_jtag ❯❯❯ openocd -f interface/cmsis-dap.cfg -f bcm2712.cfg
Open On-Chip Debugger 0.12.0
Licensed under GNU GPL v2
For bug reports, read
http://openocd.org/doc/doxygen/bugs.html
Info : Listening on port 6666 for tcl connections
Info : Listening on port 4444 for telnet connections
Info : Using CMSIS-DAPv2 interface with VID:PID=0x2e8a:0x000c, serial=SERIAL_NUMBER
Info : CMSIS-DAP: SWD supported
Info : CMSIS-DAP: Atomic commands supported
Info : CMSIS-DAP: Test domain timer supported
Info : CMSIS-DAP: FW Version = 2.0.0
Info : CMSIS-DAP: Interface Initialised (SWD)
Info : SWCLK/TCK = 0 SWDIO/TMS = 0 TDI = 0 TDO = 0 nTRST = 0 nRESET = 0
Info : CMSIS-DAP: Interface ready
Info : clock speed 1000 kHz
Info : SWD DPIDR 0x2ba01477
Info : bcm2712.cpu0: hardware has 6 breakpoints, 4 watchpoints
Info : bcm2712.cpu1: hardware has 6 breakpoints, 4 watchpoints
Info : bcm2712.cpu2: hardware has 6 breakpoints, 4 watchpoints
Info : bcm2712.cpu3: hardware has 6 breakpoints, 4 watchpoints
Info : gdb port disabled
Info : starting gdb server for bcm2712.cpu0 on 3333
Info : Listening on port 3333 for gdb connections
Info : starting gdb server for bcm2712.cpu1 on 3334
Info : Listening on port 3334 for gdb connections
Info : starting gdb server for bcm2712.cpu2 on 3335
Info : Listening on port 3335 for gdb connections
Info : starting gdb server for bcm2712.cpu3 on 3336
Info : Listening on port 3336 for gdb connections
日本ではRaspberry Pi 5の発売はまだですが、先週末には日本の技適に関する証書PDFがRaspberry Piのポータルにアップロードされ、進捗が見えてきています。残念ながらこのPDFをもって日本で買ったり使ったりして良いことにはなっておらず、製品(またはパッケージ等)にマークと番号が印字されたものが販売開始されて初めて適法に利用できるようになるため、もう少しの辛抱です。
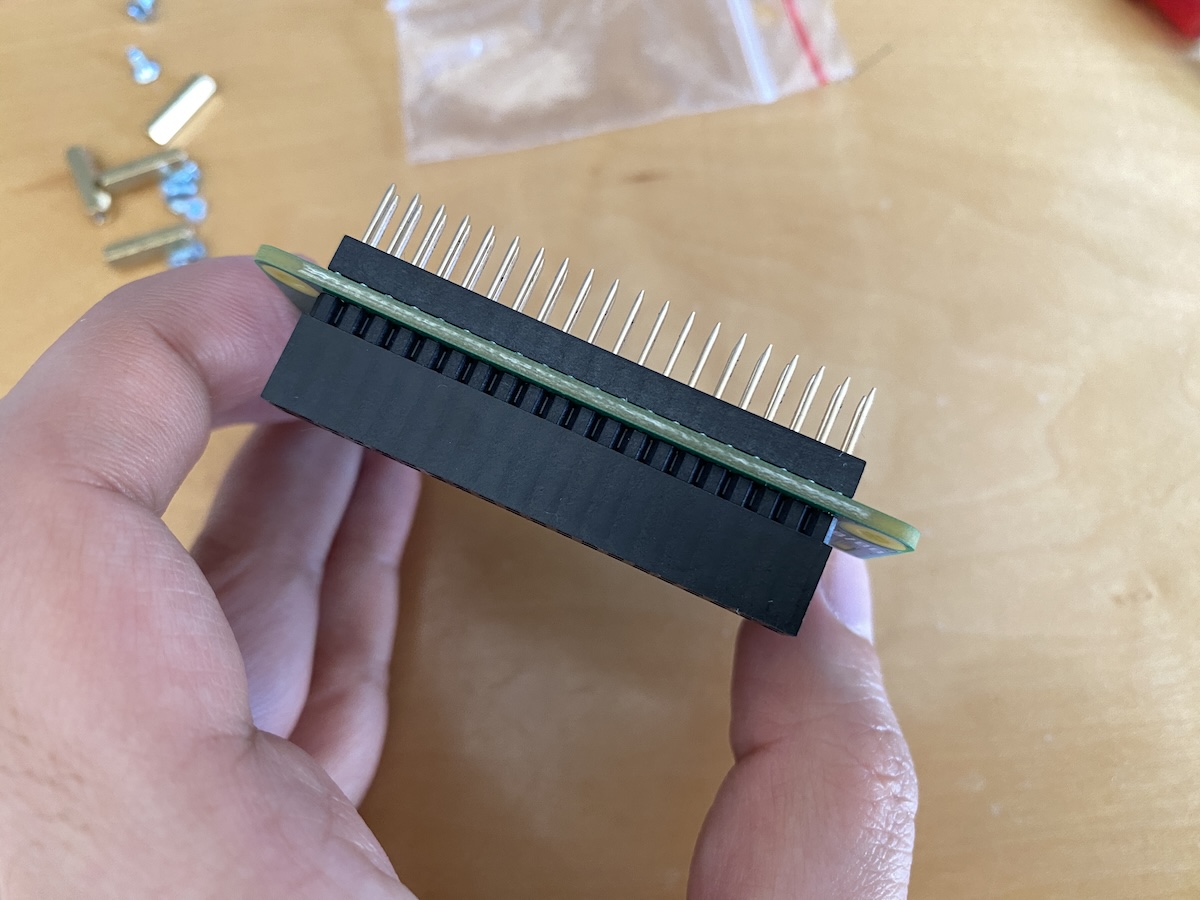
今回遊ぶ内容的にはどれを使用しても同じですが、今回はEthernet HATの方を使用しました。こちらの場合別途Raspberry Pi Picoが必要になりますが、EVB-Picoよりも全長が少し短くなってコンパクトになります。また、EVB-Picoと比べるとボード上の通電LEDがPicoで覆い隠せるため、実運用に投入するとLEDが眩しくて邪魔という問題が緩和できます。まあ、EVB-PicoのEVBはEValuation Boardの略だと思うので、実運用に適しているのかは不明ですが……。
import time
import usb_hid
from adafruit_hid.mouse import Mouse
mouse = 0
while not mouse:
try:
mouse = Mouse(usb_hid.devices)
except:
pass
time.sleep(1)
for i in range(0, 8):
mouse.move(x=20, y=20)
time.sleep(0.25)
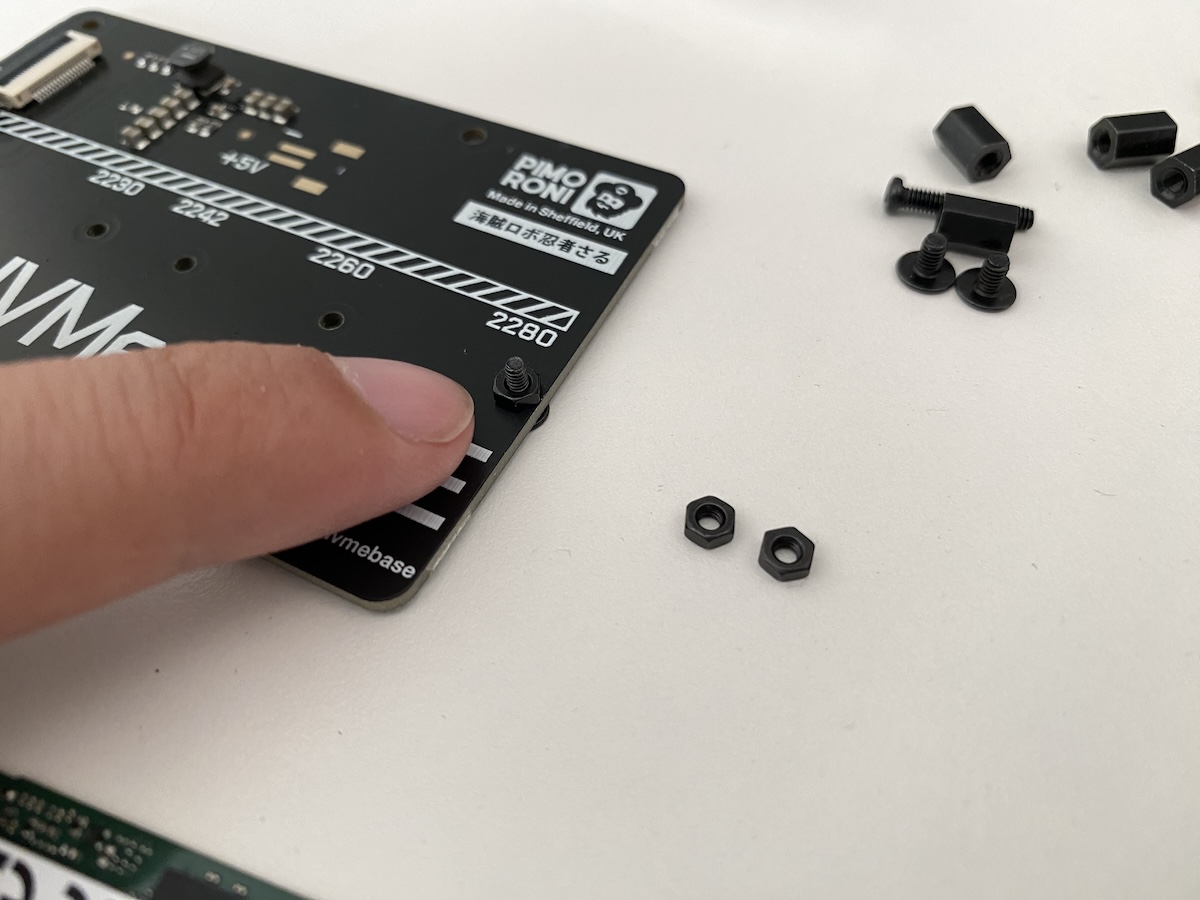
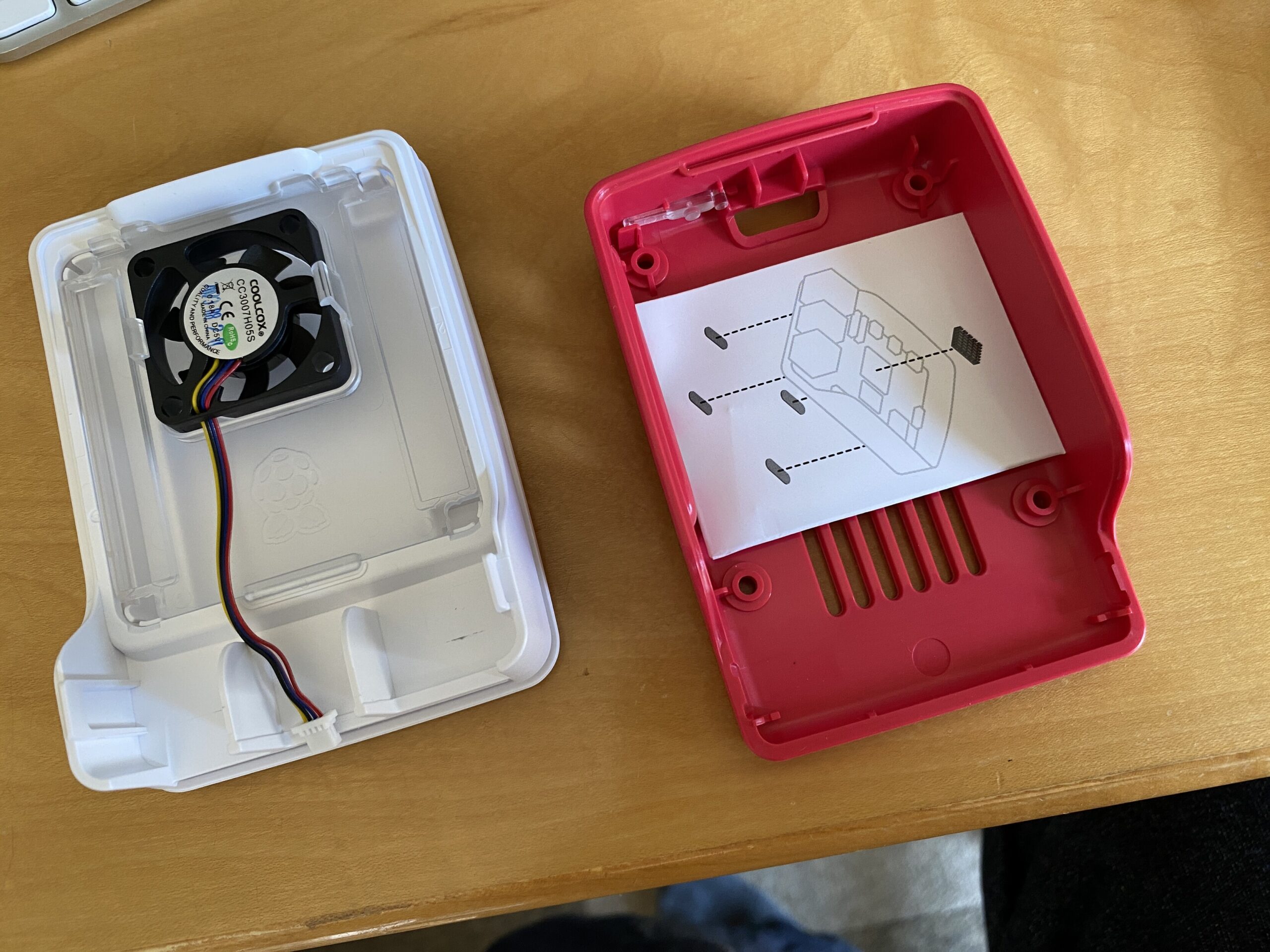
Pimoroniで予約していたケース””だけ””が届きました。PiBowと公式ケースで、いずれもサンプルではなく、いずれRaspberry Pi 5の技適が通った時のために個人用に購入したものです。……私はPi 5を2台買うんだろうか🤔ちなみに、写真のPi 5はサンプルですが。今回は話題的に通電しない済むので技適等は無関係ですね。
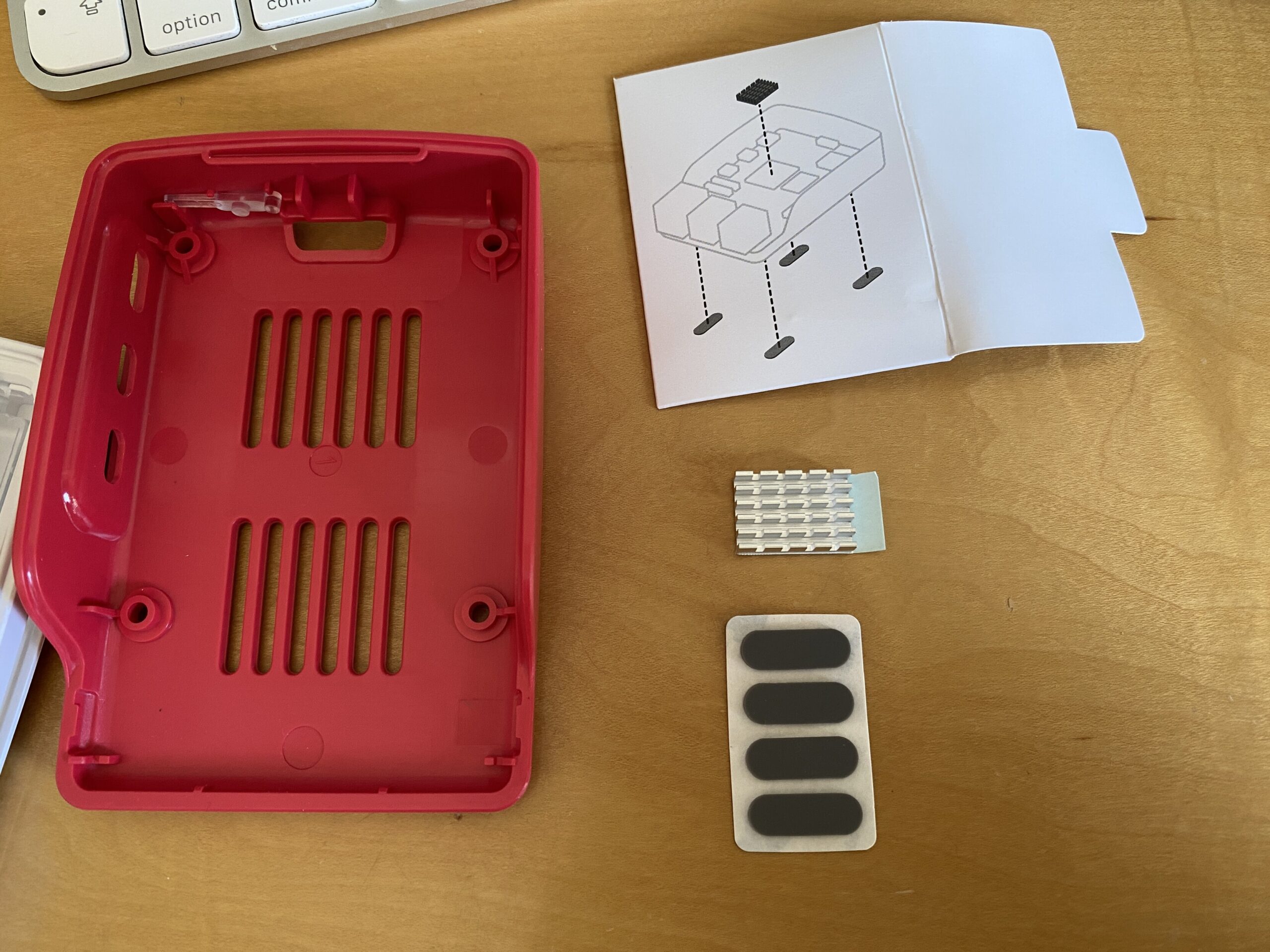
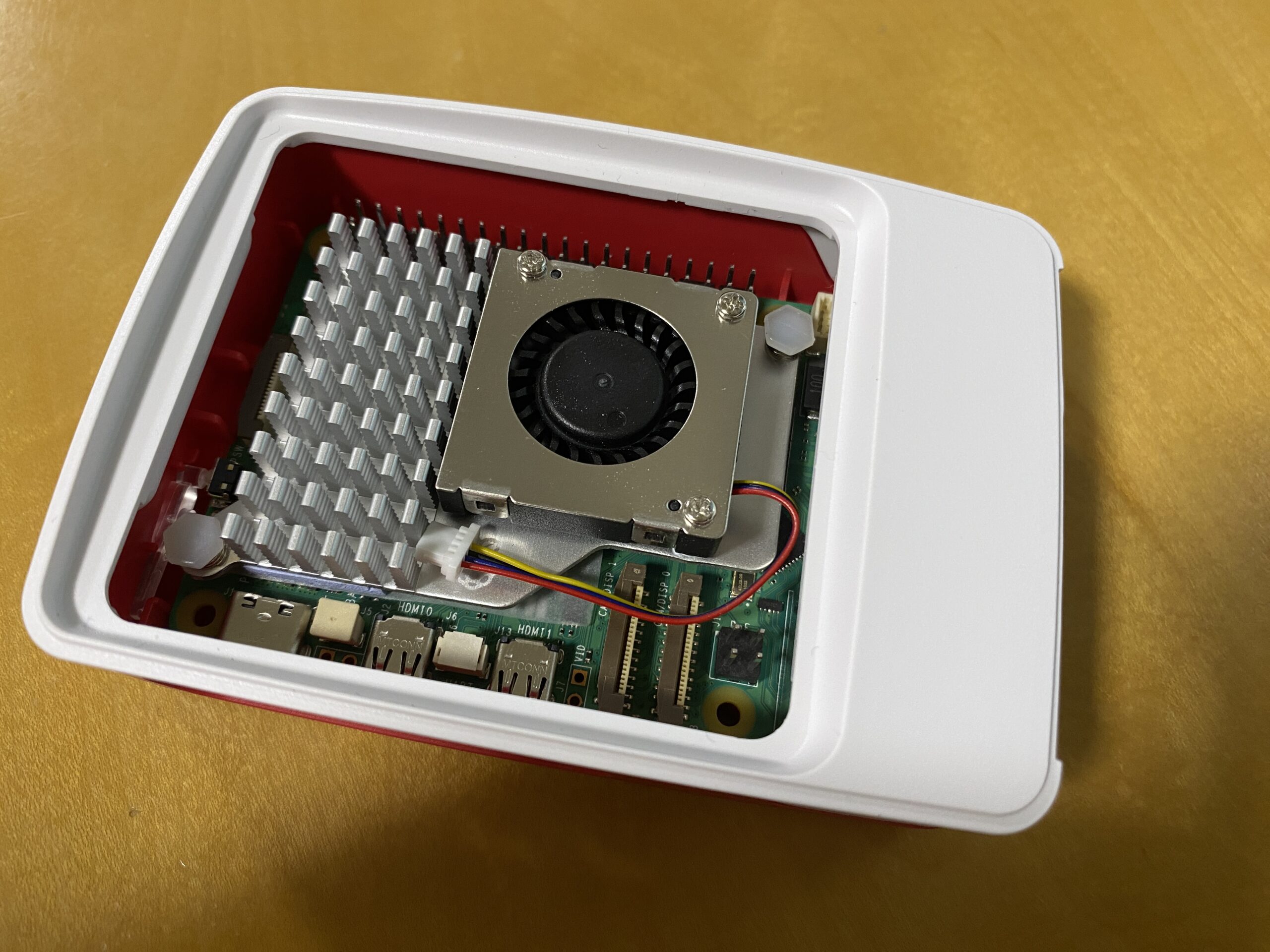
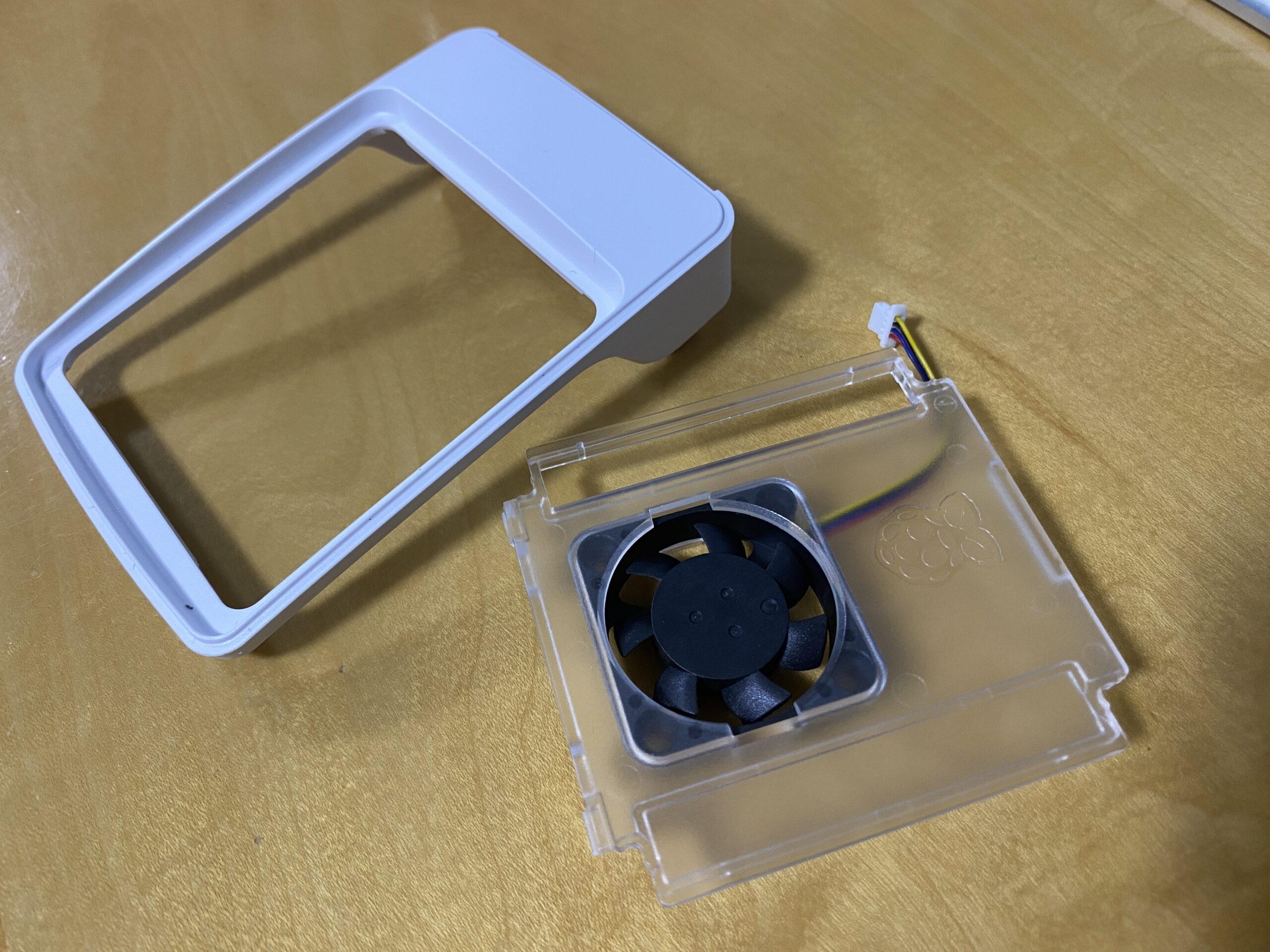
PimoroniのPiBowはすでにMaker Faire Tokyo 2023・OSC2023 Tokyo/Fall・Raspberry JAM 2023.10で展示済みですが(が、どれもレポートを書いていないですね……)、公式ケースを自分で触って組み立てたりするのは今回が始めてなので、ゆるりとレポートをしていきます。ちなみにこちらがPiBowの組み立てた様子。公式のActive Coolerを組み合わせる前提の作りで、今回もPimoroniらしい出来栄えですが、組み立て手順が少し複雑になり、下からレイヤー0〜2、Pi 5、レイヤー3、ActiveCooler、レイヤー4の順に重ねるようなりました。
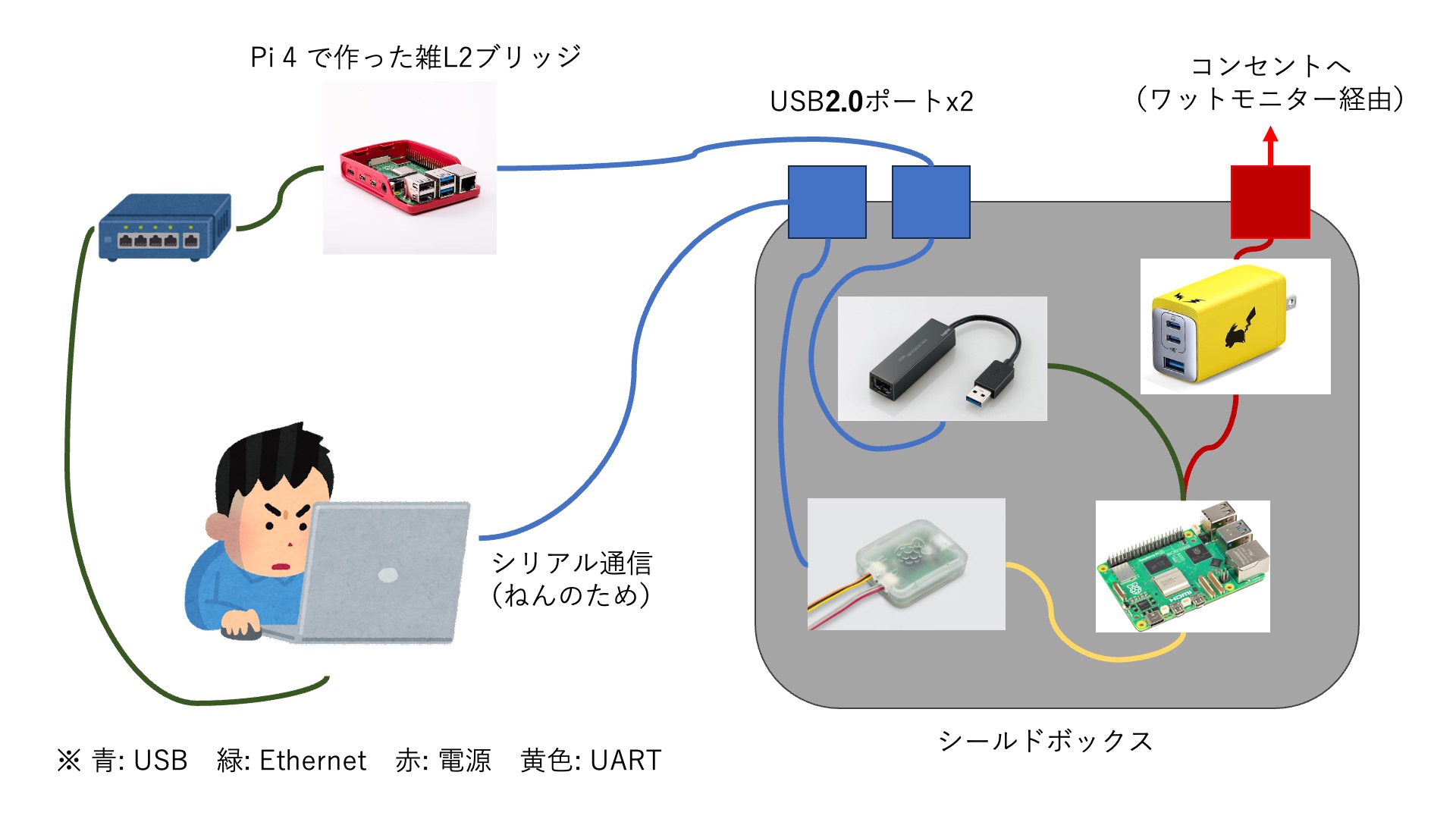
ネットワークは、ボックス内でUSB3.0-LAN変換アダプターを使用して接続し、ボックス外に出るためのUSB端子に接続します。ただし、ボックスのUSB端子はUSB2.0のため、性能は480Mbps内に制限されます。ボックス外で、Raspberry Pi 4で作ったネットワークブリッジにUSB接続し、LANに接続可能としています。iperf3での実測は200Mbps程度でしたが、ログインしたりテストに必要なパッケージを取得する程度ならなど十分でしょう。もしGbEのテストをするときは、ボックス内にPi4などを追加で投入してテストすれば対応可能です。
ボックスのもう一つのUSB端子には、Rspberry Pi Debug Probeを接続しています。これを用いることで、OS起動前の情報が取得できますし、OS起動後もシリアル通信でログインして操作することが可能です。
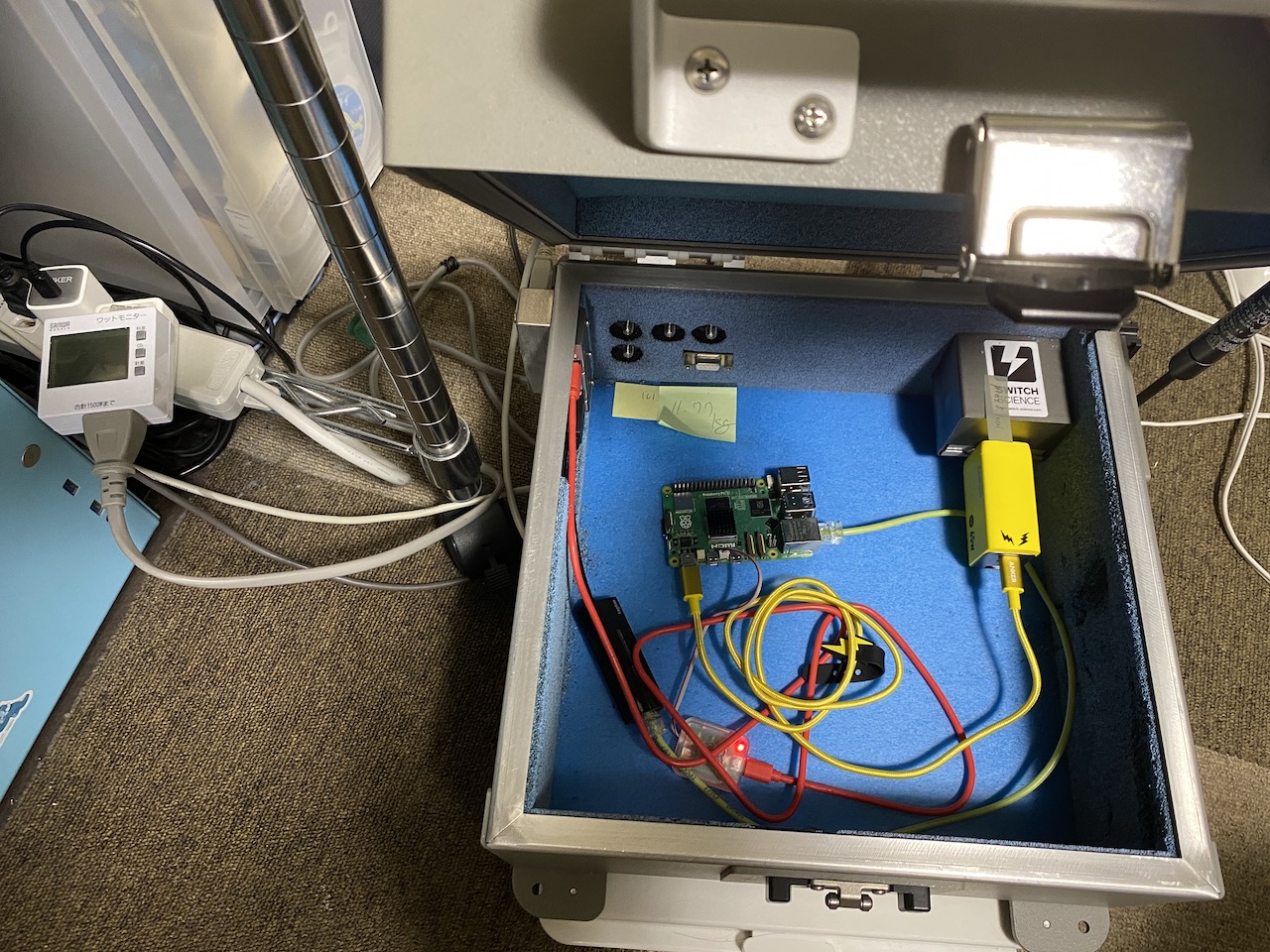
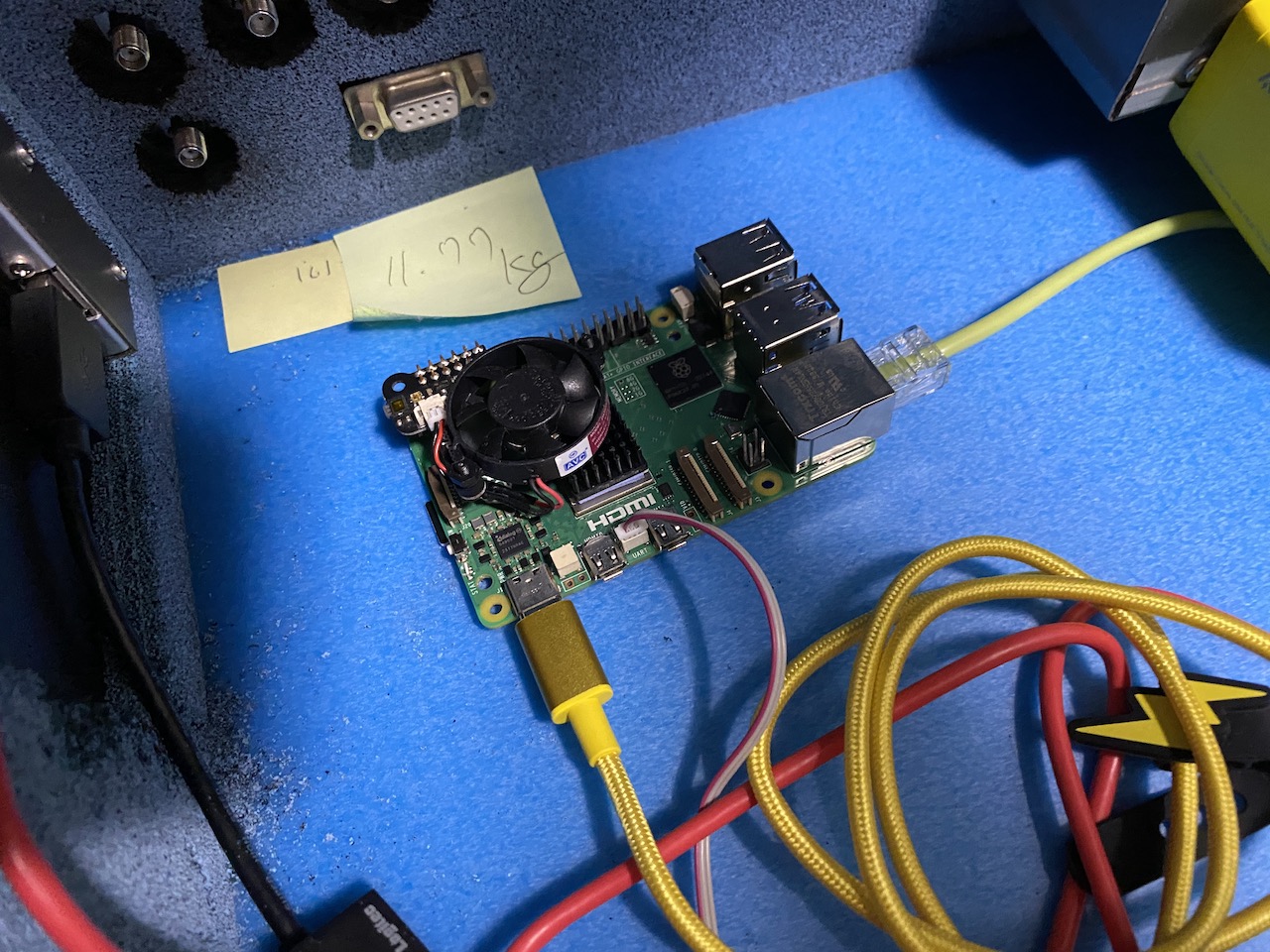
まずは小さいヒートシンクだけでSDカード起動してみる
いままでのRaspberry Piなら許された、適当な小さいヒートシンクと、MicroSDカード(Samsung EVO Plus 64GB)の組み合わせで起動してみます。シールドボックスの様子はこちら(Debug Probeが光っていますが、これは端末からの給電のためで、Raspberry Pi 5にはまだ通電していません)。
Raspberry Pi 5内の各デバイスの初期化に関するメッセージや、ブートデバイスを探して起動しようとするメッセージが見られます。そして最後の「Selecting USB low current limit」が、5V/5A電源を検出できず、USBポートの供給は600mAまでとして起動しますよ、というメッセージですね。
起動中にワットモニターが表示した消費電力は、3〜6Wの範囲でした。
このあとのシリアルの出力はOSに変わり、少しするとOSのログインプロンプトが出力されます。
NOTICE: BL31: v2.6(release):v2.6-239-g2a9ede0bd
NOTICE: BL31: Built : 14:26:57, Jun 22 2023
[ 0.902716] spi-bcm2835 107d004000.spi: no tx-dma configuration found - not using dma mode
Debian GNU/Linux 12 pios5 ttyAMA10
pios5 login:
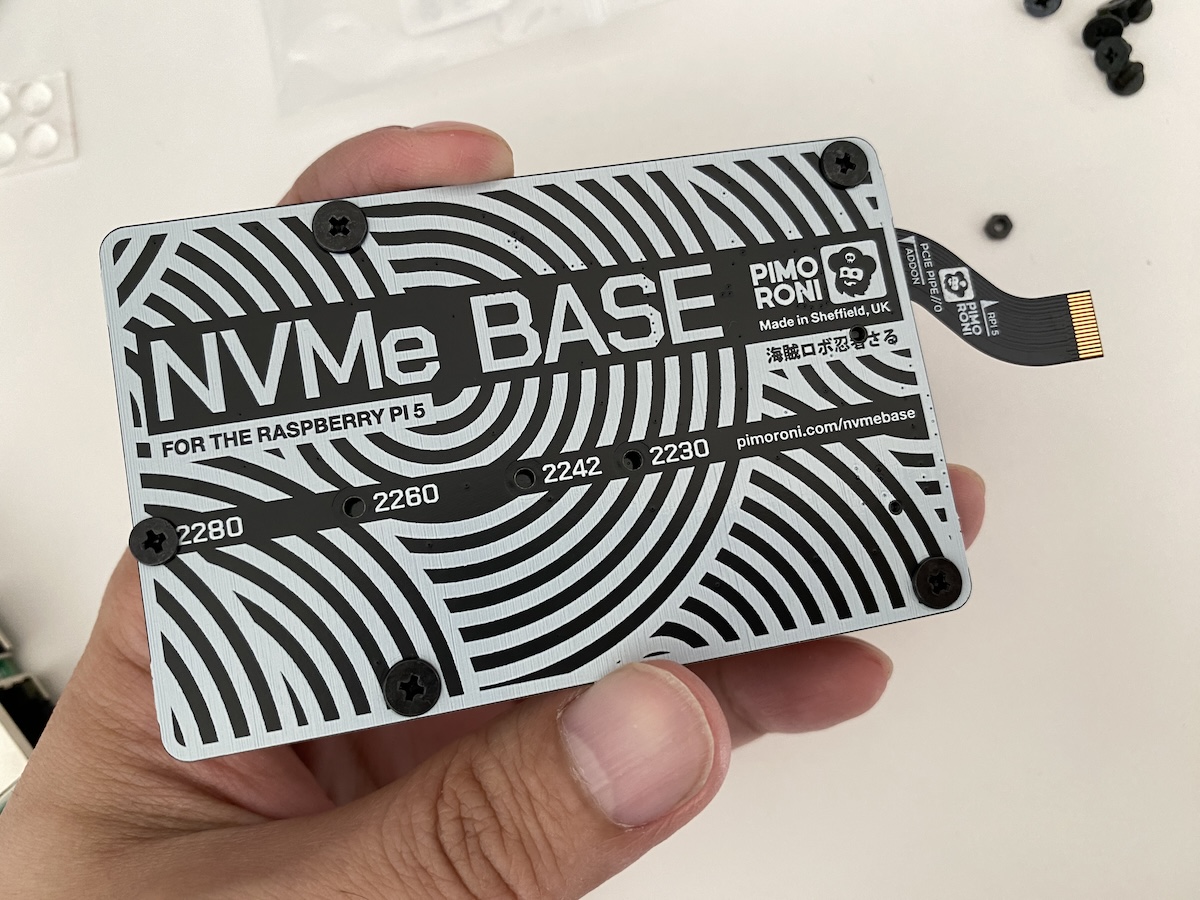
USB SSDブートにするとどうなるか確かめます。NVMe SSDをUSBに変換するケースに入れたものをUSB3.0ポートに接続して起動します。M.2 HATが発売されたら、USB3.0ではなく直接PCI Expressで接続できるようになりますね。USBとPCIeでの速度の違いを確かめたりするのが楽しみです。
通電すると、シリアル通信で以下のメッセージが表示されました。
***
USB boot requires high current (5 volt 5 amp) power supply.
To disable this check set usb_max_current_enable=1 in config.txt
or press the power button to temporarily enable usb_max_current_enable
and continue booting.
See https://rptl.io/rpi5-power-supply-info for more information
***